Mit Manjaro 24.1 alias Xahea die Entwickler der Arch-basierten Distribution eine neue Version für die Desktops Gnome, Plasma und Xfce bereit. Die Gnome-Ausgabe birgt diverse Updates für Gnome 46.
Mein neuer Udemy Onlinekurs „Ubuntu Masterclass – Ein Komplettkurs zu Ubuntu LTS (Ubuntu 24.04) für Privat und Business“ ist ab sofort online. Zum Start zum vergünstigten Preis. In diesem umfassenden Kurs tauchst Du ein in die Welt von Ubuntu Desktop, einer der beliebtesten Linux-Distributionen. Egal, ob du ein absoluter Anfänger oder bereits Vorkenntnisse hast, dieser […]
Ubuntu 24.10 unterstützt nun offiziell das Snapdragon-betriebene Lenovo ThinkPad X13s über das generische ARM64 ISO, was eine bedeutende Verbesserung darstellt. Zuvor war es möglich, Ubuntu 23.10 auf diesem Gerät zu nutzen, jedoch nur mit einem speziellen ISO für das ThinkPad. Für die Version 24.04 LTS gab es keinen offiziellen Installer. Mit Ubuntu 24.10 kann jedoch […]
Im veröffentlichten monatlichen Newsletter für September gibt Clement Lefebvre, der Leiter des Linux Mint Projekts, einen ersten Einblick in das neue Standard-Design der Cinnamon-Oberfläche, die mit Linux Mint 22.1 noch in diesem Jahr erscheinen wird. Die Veröffentlichung von Linux Mint 22.1 ist für Dezember 2024 geplant, kurz vor den Weihnachtsfeiertagen. Es wird mit der neuen […]
Dieser Artikel gibt meine Motivation für den Bau von Container-Images und die Vorgehensweise wieder und zeigt, wie ich mit Buildah meine OCI-kompatiblen Container-Images erstelle.
Es handelt sich dabei mehr um einen Erfahrungsbericht als ein Tutorial und ich erhebe keinen Anspruch auf Vollständigkeit. Das behandelte Beispiel ist jedoch zum Einstieg und zur Nachahmung für all jene geeignet, die Container ausführen können und diese gerne ohne Verwendung von Containerfiles bauen möchten.
Motivation
Ich möchte die Ansible-Rollen aus meiner Collection tronde.nextcloud mit Molecule und Podman-Containern testen. Als Zielplattform für das Deployment der Nextcloud unterstütze ich zunächst Debian und RHEL.
Die Tests sollen verifizieren, dass Nextcloud im Container in einer rootless-Podman-Umgebung bereitgestellt werden kann. Da der Test unter Verwendung von Podman-Containern durchgeführt werden soll, müssen diese Container eine solche rootless-Podman-Umgebung bereitstellen.
Für RHEL 8 und RHEL 9 habe ich entsprechende Container-Images gefunden. Für Debian bin ich nicht fündig geworden und habe daher beschlossen, diese Container-Images selbst zu erstellen.
Buildah ist das Werkzeug meiner Wahl, da:
Container-Images damit interaktiv erstellt werden können,
die verwendeten Befehle am Ende in einem Bash-Skript gesammelt werden können,
sich damit sogar interaktive Abfragen mit Heredocs beantworten lassen,
man kein containerfile(5) benötigt und
ich das Werkzeug noch nicht kenne und es gerne kennenlernen möchte.
Für mich sind dies ausreichend Gründe, um mich kopfüber in ein neues Container-Projekt zu stürzen. Wer mehr über die Beziehung von Buildah zu Podman erfahren möchte, dem empfehle ich den englischsprachigen Artikel: Buildah and Podman Relationship von Tom Sweeney.
Die folgenden Code-Blöcke zeigen Auszüge aus dem Skript buildah_create_debian_bookworm_with_rootless_podman.sh (Commit 7634ed8). Die enthaltenen Befehle werden unter dem jeweiligen Code-Block erläutert. Alle Befehle werden als normaler Benutzer ohne Root-Rechte ausgeführt.
# Name of target container image
tctri=debian_rootless_podman
# Get a base image
ctr=$(buildah from --pull=newer docker://docker.io/library/debian:bookworm)
Die Variable tctri nimmt den Namen des Container-Images auf, welches ich erzeugen werde
Die Variable ctr nimmt den Namen des Containers auf, welcher durch den buildah-from(1)-Befehl erzeugt wird; mit diesem Container wird im Folgenden gearbeitet
Die Option --pull=newer sorgt dafür, dass das Image nur dann aus der angegebenen Registry heruntergeladen wird, wenn es aktueller als das evtl. lokal gespeicherte Image ist
buildah run -- $ctr apt -y update
buildah run -- $ctr apt -y upgrade
buildah run -- $ctr apt -y install podman fuse-overlayfs libvshadow-utils libcap2-bin ca-certificates
Mit buildah-run(1) werden Befehle innerhalb des Arbeits-Containers ausgeführt
Ich aktualisiere die im Basis-Image enthaltenen Pakte und
installiere die für rootless Podman benötigten Pakete
Das Paket ca-certificates wird benötigt, um später Container-Images aus einer Registry herunterladen zu können
buildah run -- $ctr useradd podman
buildah run -- $ctr sh -c "echo podman:1:999 > /etc/subuid"
buildah run -- $ctr sh -c "echo podman:1001:64535 >> /etc/subuid"
buildah run -- $ctr sh -c "echo podman:1:999 > /etc/subgid"
buildah run -- $ctr sh -c "echo podman:1001:64535 >> /etc/subgid"
buildah run -- $ctr setcap cap_setuid+epi /usr/bin/newuidmap
buildah run -- $ctr setcap cap_setgid+epi /usr/bin/newgidmap
Mit den hier dargestellten Befehlen wird der nicht-privilegierte Benutzer podman erstellt
Die IDs für /etc/sub[g,u]id habe ich mir aus dem ubi9/podman-Image abgeschaut
Die setcap-Befehle sind notwendig, um rootless Podman ausführen zu können; ich habe sie durch Internetrecherche und Trial-and-Error zusammengestellt
Ich erstelle die Verzeichnisse, die ich im Artikel [7] gefunden habe
Ich erstelle die Environment-Variable, die ich ebenfalls in genanntem Artikel [7] gefunden habe
buildah run -- $ctr apt -y reinstall uidmap
buildah run -- $ctr apt -y clean
buildah run -- $ctr rm -rf /var/lib/apt/lists/*
Aus mir nicht bekannter Ursache muss das Paket uidmap neu installiert werden, um ein UID/GID-Mapping sicherzustellen; dies scheint analog zur Neuinstallation der shadow-utils in Artikel [7] notwendig zu sein
Die beiden folgenden Befehle sollen den Paket-Cache aufräumen, um die Größe des resultierenden Images zu verkleinern, zeigen jedoch keinen sichtbaren Effekt
# Commit to an image
buildah commit --rm $ctr $tctri
# Alternative: Use this and add GPG fingerprint for image signing
# buildah commit --sign-by <fingerprint> --rm $ctr $tctri
# Tag the image just created
buildah tag $tctri $tctri:bookworm-$(date --iso)
Mit buildah-commit(1) wird der Inhalt des Arbeits-Containers $ctr in ein Container-Image namens $tctri geschrieben
Durch Angabe der Option --rm wird der Arbeits-Container entfernt
Die Kommentarzeile lässt erkennen, dass ich zukünftig beabsichtige, meine Images digital zu signieren
Der Befehl buildah-commit(1) fügt dem neuen Image übrigens nur einen weiteren Layer hinzu, egal wie viele Befehle zuvor im Arbeits-Container ausgeführt wurden. Das erzeugte Image umfasst also die Layer des Basis-Image plus einen weiteren.
Zwischenfazit
An diesem Punkt habe ich ein Basis-Image ausgewählt, mithilfe von buildah zusätzliche Software installiert, einen Benutzer hinzugefügt und ein neues Image erzeugt.
Die fertigen Images halte ich in der Registry https://quay.io/repository/rhn-support-jkastnin/debian_rootless_podman vor. Fühlt euch frei, diese für eigene Experimente zu benutzen, doch verwendet sie nur mit Vorsicht in Produktion. Ich erzeuge diese Images nur nach Bedarf neu, so dass die veröffentlichen Versionen veraltet und voller Sicherheitslücken sein können.
Validierung
Jetzt, wo die Images fertig sind, kann ich prüfen, ob sich rootless Podman darin auch wie gewünscht ausführen lässt.
Die Prozesse innerhalb des von meinem Container-Image instanziierten Containers laufen als Benutzer root. Um die Prozesse als Benutzer podman auszuführen, ist dies beim Aufruf von podman run explizit mit anzugeben. Der folgende Code-Block verdeutlicht dies und zeigt zugleich den ersten Fehler beim Versuch rootless Podman auszuführen.
]$ podman run --rm localhost/debian_rootless_podman:bookworm-2024-09-21 id
uid=0(root) gid=0(root) groups=0(root)
]$ podman run --rm --user podman localhost/debian_rootless_podman:bookworm-2024-09-21 id
uid=1000(podman) gid=1000(podman) groups=1000(podman)
]$ podman run --rm --security-opt label=disable --user podman --device /dev/fuse localhost/debian_rootless_podman:bookworm-2024-09-21 podman info
time="2024-09-21T18:43:35Z" level=error msg="running `/usr/bin/newuidmap 15 0 1000 1 1 1 999 1000 1001 64535`: newuidmap: write to uid_map failed: Operation not permitted\n"
Error: cannot set up namespace using "/usr/bin/newuidmap": exit status 1
Der Fehler deutet auf fehlende capabilities(7) hin. Um diese Hypothese zu testen, wiederhole ich den letzten Befehl mit der Option --privileged (siehe dazu podman-run(1)):
]$ podman run --rm --security-opt label=disable --user podman --device /dev/fuse --privileged localhost/debian_rootless_podman:bookworm-2024-09-21 podman info
host:
…
Damit funktioniert es. Leider geben sich viele Menschen an dieser Stelle mit dem Ergebnis zufrieden. Doch ich möchte diese Container nicht einfach mit --privileged ausführen. Also studiere ich die Manpage capabilities(7) und teste mich Stück für Stück heran, bis ich mit dem folgenden Kommando ebenfalls erfolgreich bin:
]$ podman run --rm --user podman --security-opt label=disable --device /dev/fuse --cap-add=setuid,setgid,sys_admin,chown localhost/debian_rootless_podman:bookworm-2024-09-21 podman info
host:
…
Dies ist schon deutlich besser, da dem Container hiermit deutlich weniger Privilegien eingeräumt werden müssen. Das Thema Container-Privilegien und capabilities(7) werde ich noch genauer untersuchen. Eventuell folgt dazu dann auch ein weiterer Artikel. Für den Moment ist das Ergebnis gut genug.
Die letzten wichtigen verbleibenden Bausteine für den Realtime-Support für Linux wurden in den Mainline-Zweig aufgenommen. Das bedeutet, dass Linux 6.12 voraussichtlich in einem echtzeitfähigen Modus betrieben werden kann, wenn der Kernel entsprechend kompiliert wird.
Echtzeitfähigkeit wird insbesondere in Embedded-Szenarien benötigt, wenn auf eine Eingabe innerhalb einer vorhersagbaren Zeit eine Antwort erwartet wird. Speziell in der Robotik, aber auch in der Multimediaproduktion gibt es solche Anforderungen. Dabei kommt es nicht darauf an, dass eine Aufgabe schnell abgearbeitet wird, sondern, dass sie in einer deterministischen Zeit begonnen wird.
Ein Beispiel für Echtzeit
An dieser Stelle mag sich die Frage stellen, was diese Echtzeitfähigkeit, von der hier geredet wird, überhaupt ist. Das lässt sich gut am Beispiel eines Line-following Robot klären. Was ein solcher Roboter tut, kann man sich z. B. in diesem YouTube-Video ansehen. Technisch besteht so ein Roboter aus zwei (oder mehr) Kameras als Sensoren, zwei Motoren für jeweils ein Rad als Aktoren und einem Controller zur Steuerung. Die Kameras sollen den Kontrast ermitteln, damit festgestellt werden kann, ob sie noch auf die schwarze Linie zeigen. Bemerkt eine der Kameras beim Fahren, dass sie den Sichtkontakt zur Linie aufgrund z. B. einer Kurve verliert, müssen die Motoren durch eine leichte Drehung nachsteuern, um auf der Linie zu bleiben.
Diese Kameras lösen üblicherweise entsprechend ihrer Abtastfrequenz auf dem Controller für die Steuerung einen Interrupt aus. Das führt zur Abarbeitung der Steuerungsroutine, die für beide Motoren die Geschwindigkeit berechnet, mit der sie sich drehen sollen.
Entscheidend ist, dass nicht beide Kameras den Sichtkontakt verlieren, damit der Roboter weiterhin weiß, in welche Richtung er nachsteuern muss. Üblicherweise wird das beim Testen funktionieren, aber es kann in bestimmten Randbedingungen bei normalen Betriebssystemen, wenn der Controller z. B. mit vielen anderen Aufgaben zufälligerweise beschäftigt ist, passieren, dass auf einmal nicht schnell genug die Routine aufgerufen wird. Der Roboter verliert dann den Sichtkontakt.
Der Entwickler eines solchen Roboters kann nun eine Echtzeitanforderung formulieren, dass z. B. auf ein Interrupt von den Kameras innerhalb von 1 Millisekunde reagiert werden muss. Er kann mit dieser Anforderung jetzt die maximale Geschwindigkeit des Roboters so wählen, dass der Roboter langsam genug fährt, um nicht die Linie – trotz der Latenz von im worst-case 1 Millisekunde – nicht zu verlieren.
Diese 1 Millisekunde muss aber auch vom Controller, seinem Betriebssystem und schließlich seinem Kernel garantiert werden. Der Kernel muss also in jeder Situation in der Lage sein, auf eine Anforderung innerhalb einer vorbestimmten Zeit zu reagieren. Unabhängig von der zwingenden Fähigkeit, präemptiv zu arbeiten, also jederzeit anderer Prozesse unterbrechen zu können, darf der Kernel auch nicht mit sich selber unvorhersehbar lange beschäftigt sein, wenn z. B. eine Synchronisation hängt.
20 Jahre Arbeit
Und genau hierum geht es beim grob gesagt beim PREEMPT_RT-Patch. Der Kernel muss so nachgebessert werden, dass keine Komponente sich unnötig lange aufhängt und somit die Abarbeitung von Aufgaben behindert, für die eine garantierte Ausführungszeit festgelegt wurde.
Die ursprüngliche Arbeit begann bereits im Jahr 2004 auf einem getrennten Zweig und hatte viele Verbesserungen in den Kernel gebracht, zuletzt an der printk()-Infrastruktur. Jetzt sollten die Arbeiten so weit sein, dass Realtime nicht mehr auf einem getrennten Zweig, sondern im Hauptzweig entwickelt werden kann.
Die Echtzeitfähigkeit gab es somit in speziell präparierten Kernels schon lange. Neu ist, dass der Code im Hauptzweig gepflegt wird und somit besser mit Änderungen anderer Maintainer abgestimmt werden kann. Denn eine Änderung an einer anderen Komponente reicht schon aus, um die Echtzeitfähigkeit zu unterminieren.
Linux echtzeitfähig zu machen, ist somit ein großer Aufwand gewesen, weil man solche Fähigkeiten oft nur in spezialisierten Betriebssystemen (sogenannten Real-time operating systems, RTOS) vorfindet. Insbesondere Thomas Gleixner und John Ogness haben hier große Anstrengungen unternommen. Jetzt, nach knapp 20 Jahren Arbeit, dürfte das Vorhaben einen wichtigen Meilenstein erreichen.
Wer sich für einen tieferen Einblick in die Linux-RT-Welt interessiert, kann einerseits den Artikel von Thomas Leemhuis auf Heise Online von letzter Woche lesen oder sich auf LWN durch das Artikelarchiv zu der Thematik arbeiten.
In der OpenPrinting Common Unix Printing System (CUPS) auf Linux-Systemen wurden neue Sicherheitslücken entdeckt. Unter bestimmten Bedingungen könnten diese Schwachstellen eine Fernbefehlsausführung ermöglichen. Ein entfernter, nicht authentifizierter Angreifer kann dabei unbemerkt bestehende Drucker-URLs durch bösartige URLs ersetzen. Sobald ein Druckauftrag von diesem Computer gestartet wird, kann der Angreifer beliebige Befehle mit den entsprechenden Benutzerrechten ohne […]
Die Document Foundation hat die allgemeine Verfügbarkeit von LibreOffice 24.8.2 angekündigt. Dies ist das zweite Wartungsupdate der neuesten LibreOffice 24.8 Office-Suite-Serie und behebt über 80 Fehler. Zwei Wochen nach LibreOffice 24.8.1 ist das Update 24.8.2 da. Es behebt weitere lästige Fehler, Abstürze und andere Probleme, die von Nutzern gemeldet wurden. Dies sollte die Stabilität und […]
In diesem Beitrag vergleichen wir Kubuntu und KDE neon – zwei beliebte Linux-Distributionen, die den KDE Plasma-Desktop auf Ubuntu Basis verwenden. Beide haben Gemeinsamkeiten, aber auch wesentliche Unterschiede, besonders in Bezug auf Zielgruppe, Update-Zyklus und Benutzerfreundlichkeit. Ob du ein Anfänger oder ein KDE-Fan bist, wir schauen uns an, welche Option für dich besser geeignet ist. […]
Vielleicht wollen oder können Sie Ubuntu nicht direkt auf Ihr Notebook oder Ihren PC installieren. Dennoch interessieren Sie sich für Linux oder brauchen eine Installation für Schule, Studium oder Software-Entwicklung. Diese Artikelserie fasst drei Wege zusammen, Ubuntu 24.04 virtuell zu nutzen:
Teil II: mit VirtualBox (Windows mit Intel/AMD-CPU)
Teil III (dieser Text): mit UTM (macOS ARM)
In diesem Artikel gehe ich davon aus, dass Sie einen Mac mit ARM-CPU (M1, M2 usw.) verwenden. Für ältere Modelle mit Intel-CPUs gelten z.T. andere Details, auf die ich hier nicht eingehe. Insbesondere müssen Sie dann eine ISO-Datei für x86-kompatible CPUs verwenden, anstatt, wie hier beschrieben, eine ARM-ISO-Datei!
Virtualisierungssysteme für macOS ARM
Sie haben die Wahl:
Parallels Desktop: gut, aber wegen jährlicher Update-Pflicht sehr teuer
VMWare Fusion: kostenlos (for personal use), aber gut versteckter Download (erfordert vorher Registrierung bei Broadcom, danach lange Suche), verwirrende Bedienung, unklare Zukunft
UTM: Open-Source-Programm, kostenloser Download oder 10 EUR über App Store (einziger Unterschied: automatische Updates)
VirtualBox: kostenlos, aber aktuell erst als Beta-Version verfügbar und extrem langsam
Ich konzentriere mich hier auf UTM, der aus meiner Sicht überzeugendsten Lösung.
UTM
UTM ist ein Open-Source-Programm, das nur als Schnittstelle zu zwei Virtualisierungssystemen dient: dem aus der Linux-Welt bekannten QEMU-System sowie dem Apple Hypervisor Virtualization Framework (integraler Bestandteil von macOS seit Version 13, also seit Herbst 2022). UTM ist also lediglich eine grafische Oberfläche und delegiert die eigentliche Virtualisierung an etablierte Frameworks.
Sie können UTM um ca. 10 EUR im App Store kaufen und so die UTM-Entwickler ein wenig unterstützen, oder das Programm kostenlos von https://mac.getutm.app/ herunterladen und (vollkommen unkompliziert!) selbst installieren.
Sodann können Sie mit UTM virtuelle Maschinen mit Linux, Windows und macOS ausführen. Ich behandle hier ausschließlich Linux.
QEMU oder Apple Virtualization?
Wenn Sie in UTM eine neue virtuelle Maschine für Linux einrichten, haben Sie die Wahl zwischen zwei Virtualisierungssystemen: QEMU und Apple Virtualization. Welches ist besser?
Die QEMU-Variante bietet viel mehr Konfigurationsmöglichkeiten rund um die Netzwerkeinbindung und das Grafiksystem. Allerdings braucht die virtuelle Maschine doppelt so viel RAM wie vorgesehen: Wenn Sie eine VM mit 4 GB RAM einrichten, gehen beim Betrieb 8 GB RAM im macOS-Arbeitsspeicher verloren! macOS ist gut dabei, ungenutzte RAM-Teile zu komprimieren oder auszulagern, dennoch ist diese RAM-Verschwendung Wahnsinn. (Das gleiche Problem habe ich übrigens auch bei Tests mit VMWare Fusion festgestellt.)
Bei Apple Virtualization funktioniert die Speicherverwaltung, d.h. eine virtuelle Maschine mit 4 GB RAM braucht tatsächlich nur 4 GB RAM. (Das sollte ja eigentlich selbstverständlich sein …) Dafür haben Sie bei der Netzwerkkonfiguration kaum Wahlmöglichkeiten. Die VMs werden immer über eine Netzwerkbrücke in das lokale Netzwerk integriert. Es gibt zwar zwei Optionen, Gemeinsames Netzwerk und Bridge-Modus. Soweit ich es nachvollziehen kann, reduziert Gemeinsames Netzwerk nur die Optionen für den Bridge-Modus, ändert aber daran nichts. Das Apple Virtualization Framework würde auch NAT unterstützen, aber UTM stellt diese Option nicht zur Wahl.
In der Oberfläche von UTM wird die Verwendung von Apple Virtualization als experimentell bezeichnet. Ich habe bei meinen Tests leider mit beiden Frameworks gelegentliche Abstürze von virtuellen Maschinen erlebt. Ich würde beide Frameworks als gleichermaßen stabil betrachten (oder auch instabil, je nach Sichtweise; unter Linux mit QEMU/KVM sind mir Abstürze unbekannt). Persönlich verwende ich, vor allem um RAM zu sparen, für neue VMs nur mehr die Apple Virtualization. Glücklicherweise passt der Bridge Modus gut zu meinen Netzwerkanforderungen.
Wenn Sie VMs mit macOS oder Windows erstellen, entfällt die Wahlmöglichkeit. Windows VMs können nur durch QEMU ausgeführt werden, macOS VMs nur mit dem Apple Virtualization Framework.
Ubuntu installieren
Die erste Hürde hin zur Ubuntu-Installation besteht darin, ein ARM-ISO-Image zu finden. Auf den üblichen Download-Seiten finden Sie nur die x86-Variante von Ubuntu Desktop. Es gibt aber sehr wohl ein ARM-Image! Es ist auf der Website cdimage.ubuntu.com versteckt (noble-desktop-arm64.iso):
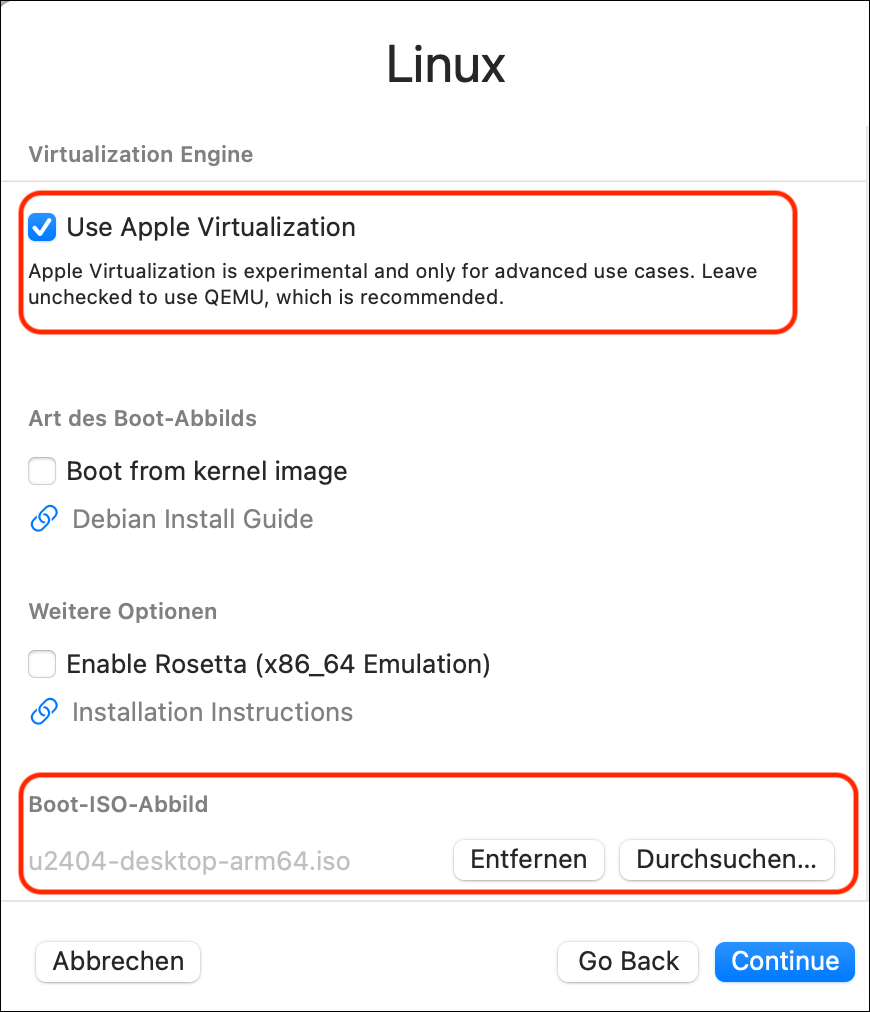
In UTM klicken Sie auf den Plus-Button, um eine neue virtuelle Maschine einzurichten. Danach wählen Sie die folgenden Optionen:
Virtualisieren
Linux
Option Use Apple Virtualiuation, Button Durchsuchen, um die ISO-Datei (das Boot-ISO-Abbild) auszuwählen
Speicher: 4 GB ist zumeist eine sinnvolle Einstellung
Prozessorkerne: ich verwende zumeist 2, die Einstellung Standard ist auch OK
Datenspeicher (Größe des Disk-Images): nach Bedarf, 25 GB sind in meiner Erfahrung das Minimum
Freigegebener Ordner: sollte die Nutzung eines macOS-Verzeichnisses innerhalb der virtuellen Maschine ermöglichen, funktioniert meines Wissens aber nur, wenn die virtuelle Maschine selbst macOS ist
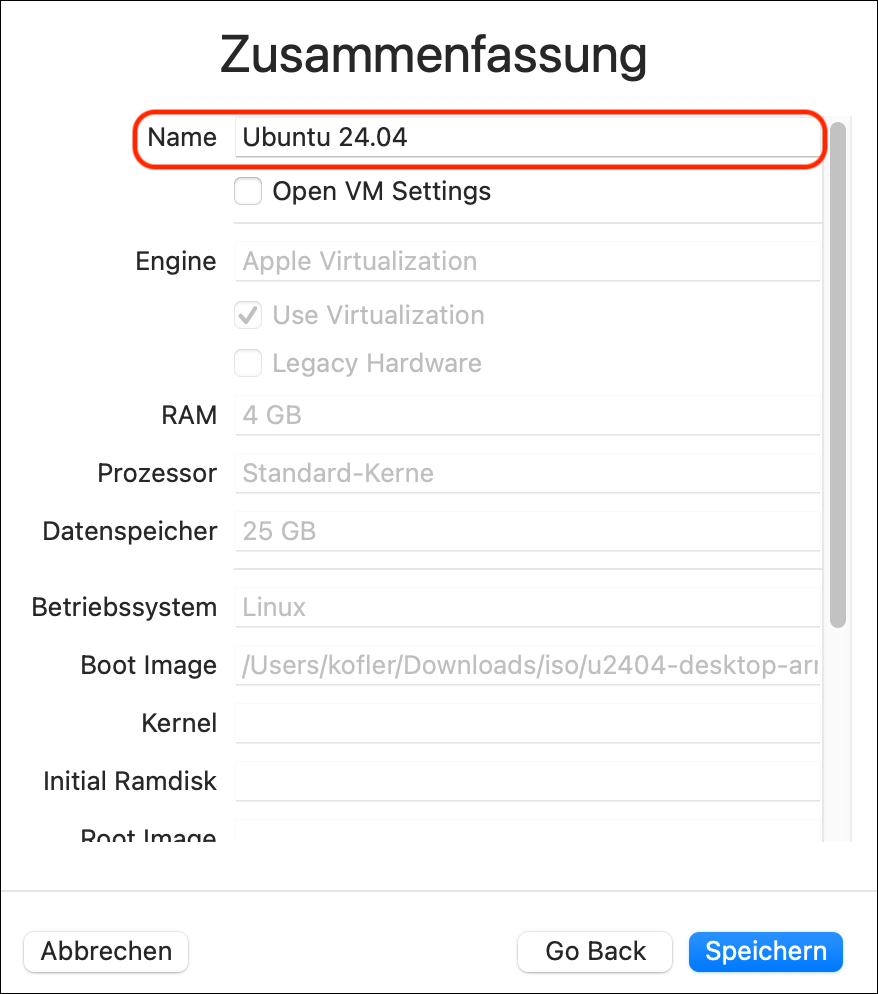
Zusammenfassung: hier geben Sie der virtuellen Maschine einen Namen
Setup der neuen virtuellen Maschine in UTMEinstellung des Namens der virtuellen Maschine
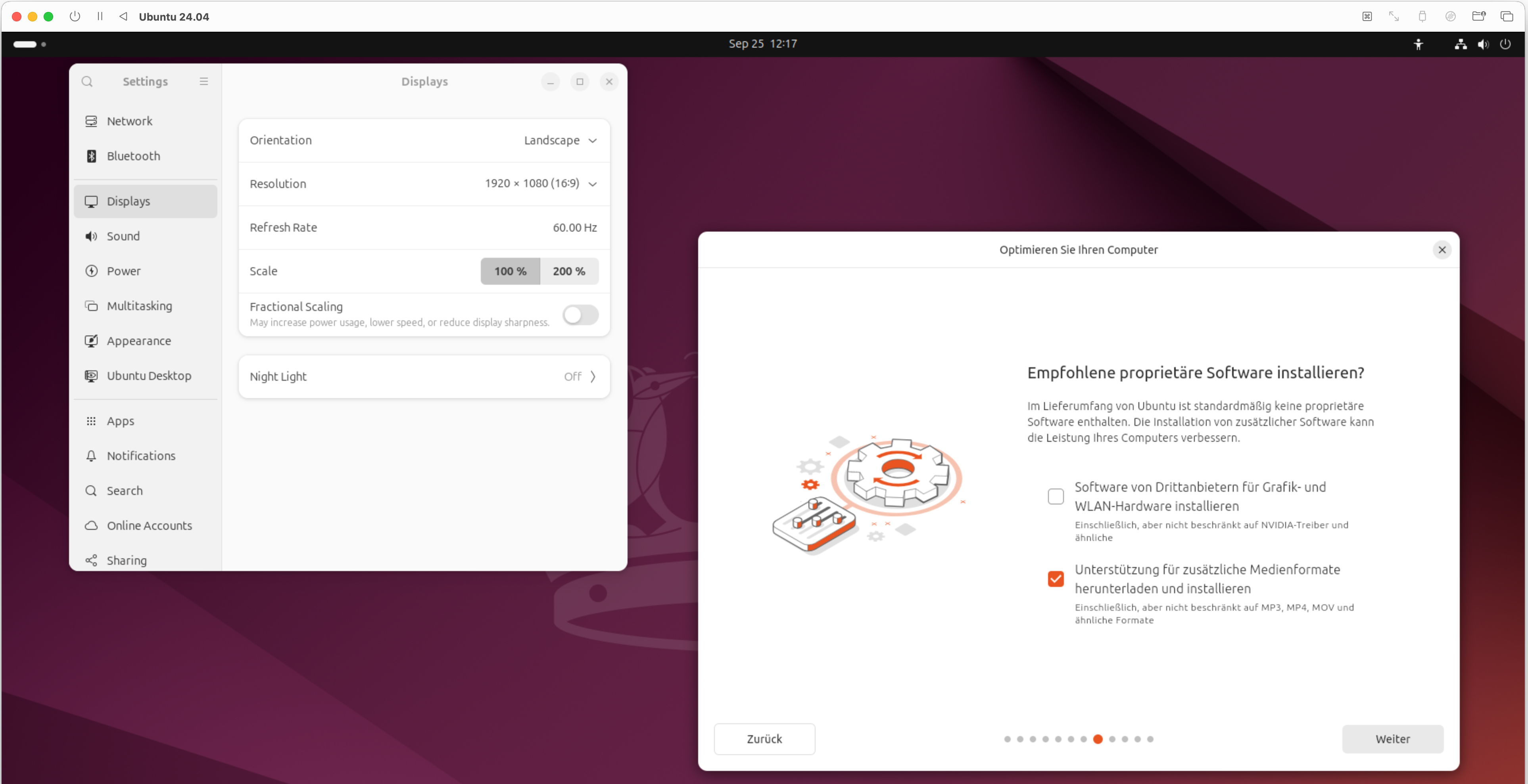
Nachdem Sie alle Einstellungen gespeichert haben, starten Sie die virtuelle Maschine. Nach ca. 30 Sekunden sollte der Desktop mit dem Installationsprogramm erscheinen (erster Dialog: Welcome to Ubuntu). Falls das Installationsprogramm je nach Monitor auf einem riesigen Desktop winzig dargestellt wird, öffnen Sie rechts oben über das Panel-Menü die Einstellungen (Zahnrad-Icon), suchen das Dialogblatt Displays und wählen eine kleinere Bildschirmauflösung aus.
Im Installationsprogramm stellen Sie nun die gewünschte Sprache ein. Bei der Einstellung des Tastaturlayouts wählen Sie Deutsch und die Tastaturvariante Deutsch Macintosh, damit die Mac-Tastatur unter Ubuntu richtig funktioniert. Alle weiteren Einstellungen erfolgen wie bei einer Installation unter VirtualBox, siehe Ubuntu 24.04 in VirtualBox ausführen. Sie brauchen keine Software von Drittanbietern, können aber die Option Unterstützung für zusätzliche Medieformate aktivieren.
Ausführung des Ubuntu-Installationsprogramms
Nach Abschluss aller Setup-Dialoge dauert die Installation ca. fünf Minuten. Da während der Installation manche Pakete aus dem Internet heruntergeladen werden, ist die Dauer der Installation auch von der Geschwindigkeit Ihres Internetzugangs abhängig.
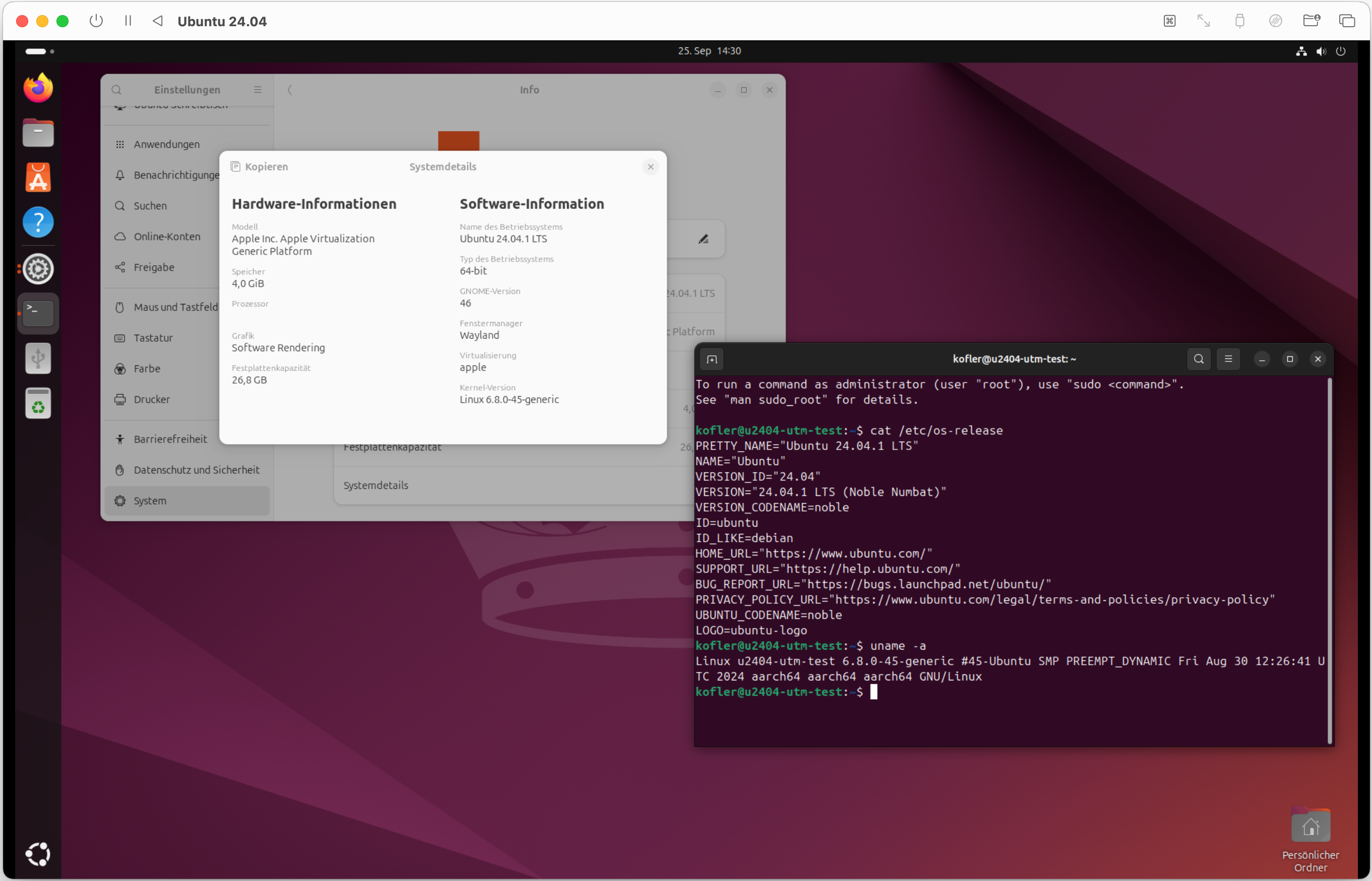
Ubuntu nutzen
Nach dem ersten Neustart erscheint der Ubuntu-Desktop. Wieder kann es je nach Monitor passieren, dass die Grafikauflösung in der virtuellen Maschine zu groß ist. Öffnen Sie das Programm Einstellungen, dort das Dialogblatt Anzeigegeräte und stellen Sie eine passende Auflösung ein. Im Unterschied zu anderen Virtualisierungsprogramme ändert sich die Auflösung nicht automatisch, wenn Sie das UTM-Fenster verändern. Stattdessen wird der im Fenster angezeigte Inhalt skaliert.
Damit sich die Maus in der virtuellen Maschine wie unter macOS verhält, aktivieren Sie in Einstellungen/Maus und Tastfeld die Option Natürliche Rollrichtung.
Um Text zwischen macOS und Ubuntu auszutauschen, können Sie die Zwischenablage verwenden. Dazu muss weder zusätzliche Software installiert noch irgendeine Konfiguration verändert werden.
Zum Austausch von Dateien verwenden Sie am einfachsten scp.
Ubuntu 24.04 (ARM) läuft unter macOS
Speicherort der virtuellen Maschinen
UTM speichert die virtuellen Maschinen im Verzeichnis Library/Containers/com.utmapp.UTM. In der Regel ist es nicht zweckmäßig, die riesigen Image-Dateien in das TimeMachine-Backup mit aufzunehmen. Fügen Sie daher bei den TimeMachine-Einstellungen eine entsprechende Regel hinzu.
Vielleicht wollen oder können Sie Ubuntu nicht direkt auf Ihr Notebook oder Ihren PC installieren. Dennoch interessieren Sie sich für Linux oder brauchen eine Installation für Schule, Studium oder Software-Entwicklung. Diese Artikelserie fasst drei Wege zusammen, Ubuntu 24.04 virtuell zu nutzen:
VirtualBox war lange Zeit das dominierende Virtualisierungsprogramm für Privatanwender: kostenlos (wenn auch nicht vollständig Open Source), funktionell, relativ einfach zu bedienen und für alle drei relevanten Betriebssysteme verfügbar (Windows, macOS, Linux).
Diese Rolle ist zuletzt stark ins Wanken gekommen. Aus meiner Sicht gibt es drei gravierende Probleme:
VirtualBox unter Windows (mit x86-kompatiblen CPUs) litt in den vergangenen Jahren immer wieder unter massiven Stabilitätsproblemen. Möglicherweise wurde diese durch Inkompatibilitäten mit dem Microsoft-Hypervisor (Hyper-V) ausgelöst — wirklich schlüssig war es für mich nie. Wenn VirtualBox auf zehn Studenten-Notebooks mit Windows funktioniert, kann dieselbe Version auf dem elften Notebook Probleme bereiten, die nur schwer nachzuvollziehen sind.
Das zweite Problem besteht darin, dass VirtualBox Intel/AMD-CPUs voraussetzt. Zwar gibt es eine Beta-Version von VirtualBox für Macs mit M1/M2/…-CPU, diese ist aber noch unerträglich langsam. Für Windows oder Linux auf ARM-Hardware gibt es gar keine Angebote.
Schließlich hatte ich zuletzt immer wieder Schwierigkeiten mit den unzähligen Zusatzfunktionen von VirtualBox. Die Installation der Guest Tools hakt, das Grafiksystem zeigt Darstellungsfehler, die geteilten Verzeichnisse haben in der VM die falschen Zugriffsrechte usw. Weniger wäre mehr.
Aktuell gibt es mit dem ganz frischen Release von VirtualBox 7.1.0) noch ein Problem: Die Netzwerkgeschwindigkeit in den virtuellen Maschinen ist unerträglich langsam. Das Problem ist bekannt und wird hoffentlich demnächst behoben. Bis dahin empfehle ich Ihnen, mit Version 7.0.20 zu arbeiten. Ich habe die in diesem Artikel beschriebene Installation mit 7.1.0 durchgeführt (und damit auch die Screenshots erstellt), bin aber im Anschluss zurück auf die alte Version umgestiegen. Das Format der virtuellen Maschinen hat sich zum Glück nicht geändert. Ältere VirtualBox-Downloads finden Sie hier.
Wenn ich Sie bis jetzt nicht abgeschreckt habe, erläutere ich Ihnen im Folgenden die Installation von Ubuntu 24.04 in einer virtuellen Maschine, die in VirtualBox 7.0 unter Windows 11 (für Intel/AMD) läuft.
Ubuntu installieren
Zuerst müssen Sie VirtualBox installieren. Danach brauchen Sie zur Installation von Ubuntu das ISO-Image von Ubuntu, das Sie von der Ubuntu-Download-Seite herunterladen.
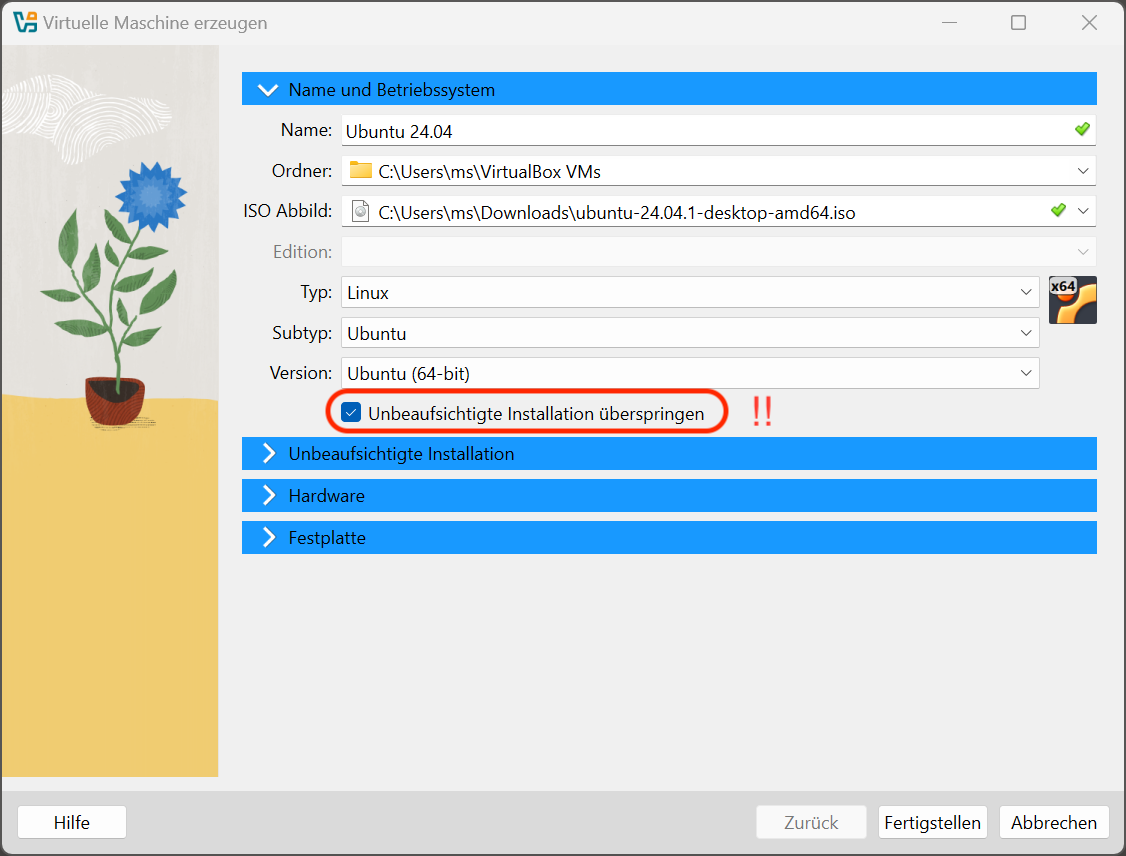
Als nächstes richten Sie in VirtualBox mit dem Button Neu eine neue virtuelle Maschine ein. Im ersten Blatt des Setup-Dialogs geben Sie der virtuellen Maschine einen Namen und wählen die ISO-Datei aus. VirtualBox erkennt selbst, dass die ISO-Datei Ubuntu enthält, und stellt Typ, Subtyp und Version selbst ein.
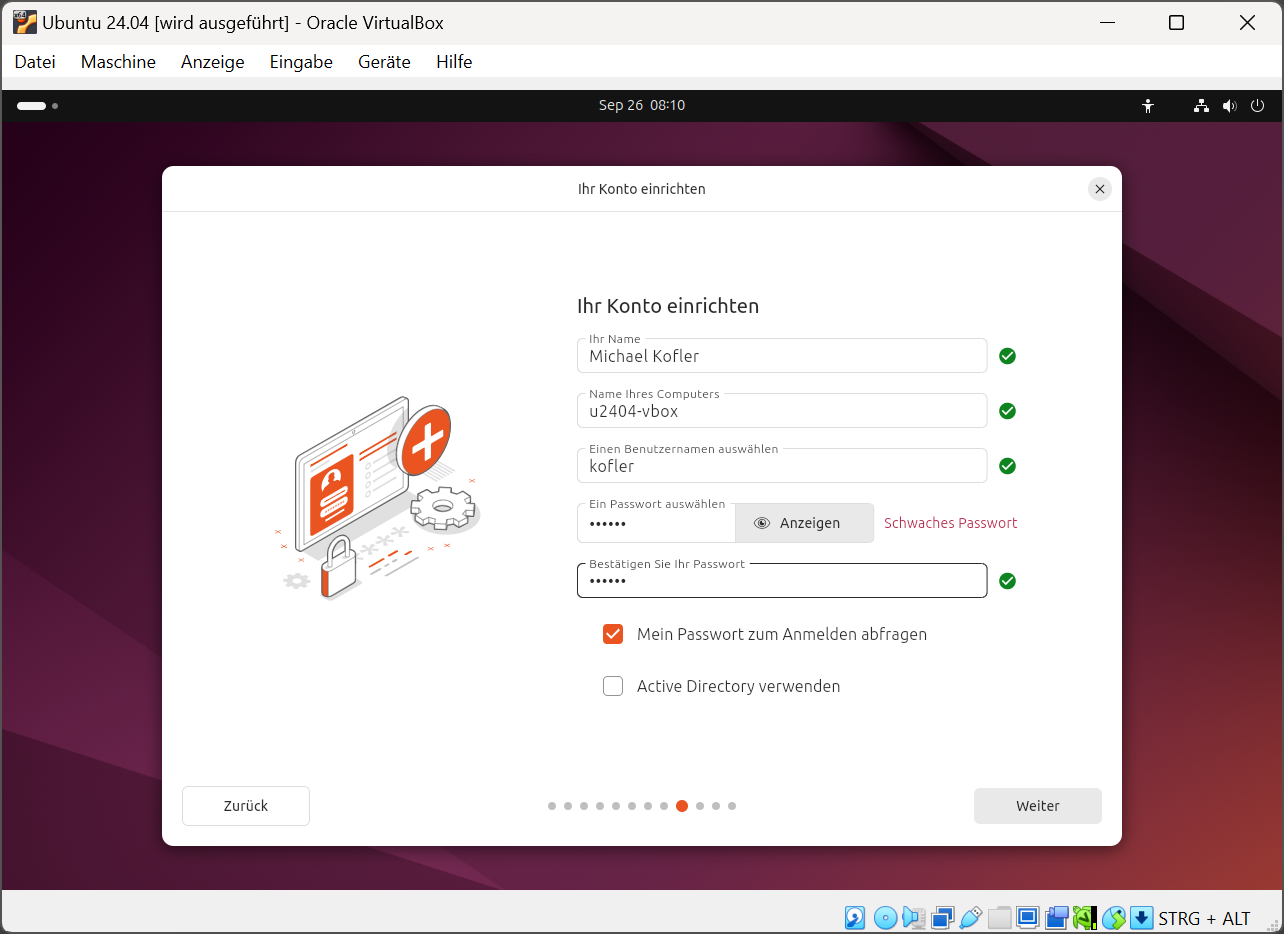
VirtualBox kann bei Ubuntu eine Unbeaufsichtigte Installation durchführen. Dazu geben Sie im folgenden Dialogblatt den Benutzernamen, das Passwort und den gewünschten Hostnamen an. Sie ersparen sich mit einer unbeaufsichtigten Installation die Bedienung des Ubuntu-Installationsprogramms. Allerdings hat diese Installationsvariante den Nachteil, dass Ubuntu nach der Installation englische Menüs anzeigt und ein englisches Tastaturlayout verwendet. Deswegen ist es aus meiner Sicht sinnvoll, die Option Unbeaufsichtigte Installation überspringen zu aktivieren.
Die unbeaufsichtigte Installation hat mehr Nach- als Vorteile
Im Dialogblatt Hardware sollten Sie der virtuellen Maschine zumindest 4 GB RAM und zwei CPU-Cores zuweisen. Die vorgeschlagenen 2 GB RAM sind definitiv zu wenig und führen dazu, dass nicht einmal der Start der virtuellen Maschine möglich ist!
Im Dialogblatt Festplatte stellen Sie ein, wie groß die virtuelle Disk sein soll. 25 GB ist aus meiner Sicht das Minimum, um Ubuntu ein wenig auszuprobieren. Je nach Verwendungszweck brauchen Sie aber natürlich mehr Speicherplatz.
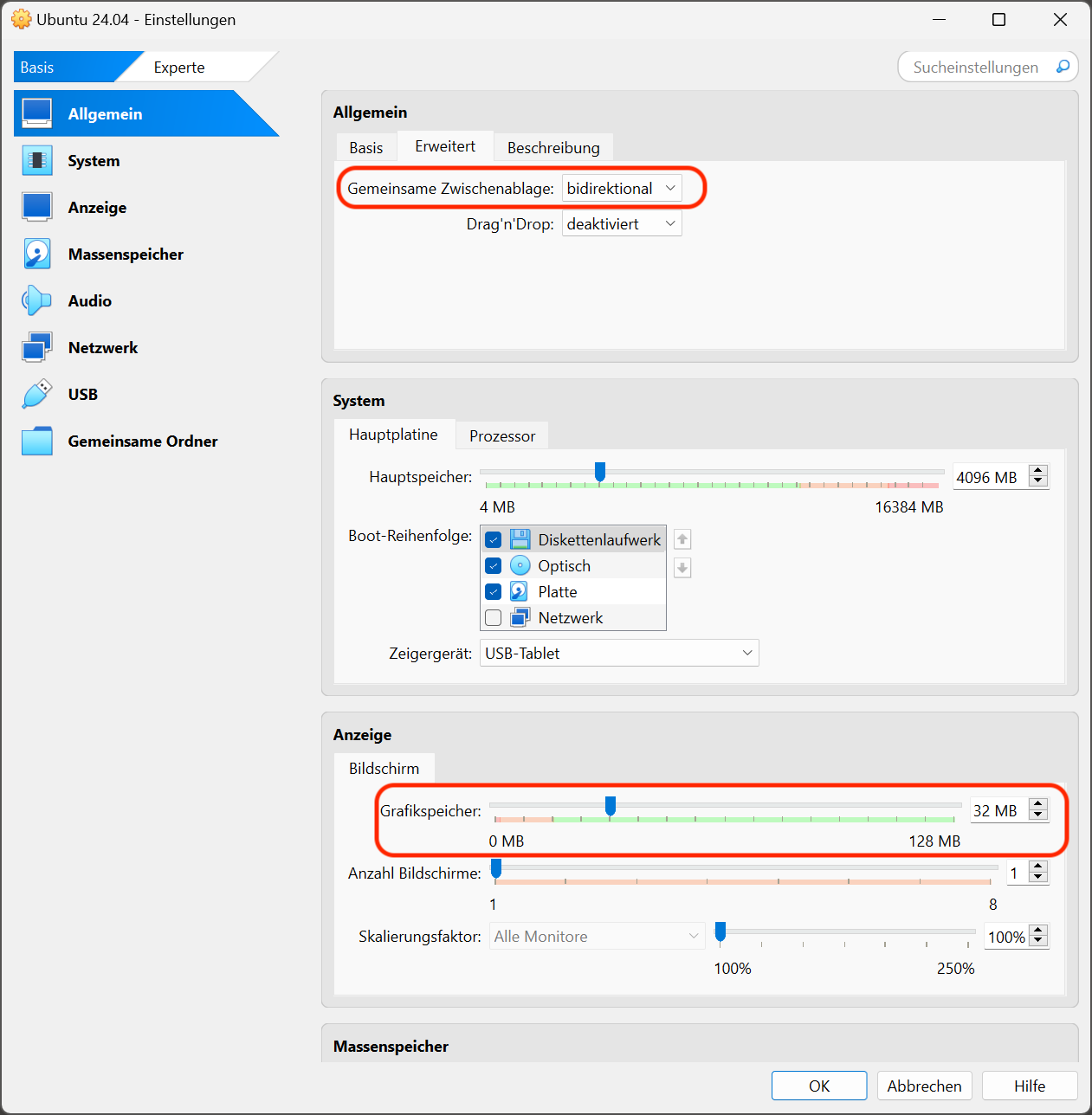
Fertigstellen beendet den Dialog. Bevor Sie mit der Installation starten, sollten Sie nun mit Ändern noch zwei Einstellungen der virtuellen Maschine anpassen:
Anzeige/Bildschirm/Grafikspeicher = mindestens 32 MB, ich empfehle das Maximum von 128 MB
Optionale Einstellungen für die virtuelle Maschine. Dem Grafiksystem sollten zumindest 32 MB RAM zur Verfügung stehen.
Ein Doppelklick auf das VM-Icon startet die virtuelle Maschine. Nach ca. einer halben Minute erscheint der Ubuntu-Desktop mit dem Installationsprogramm. Unter Umständen wird vorher im Textmodus die beunruhigende Fehlermeldung * vmwgfx seems to be running on an unsupported hypervisor* angezeigt. Zumindest bei meinen Tests startet das Grafiksystem wenig später dennoch fehlerfrei.
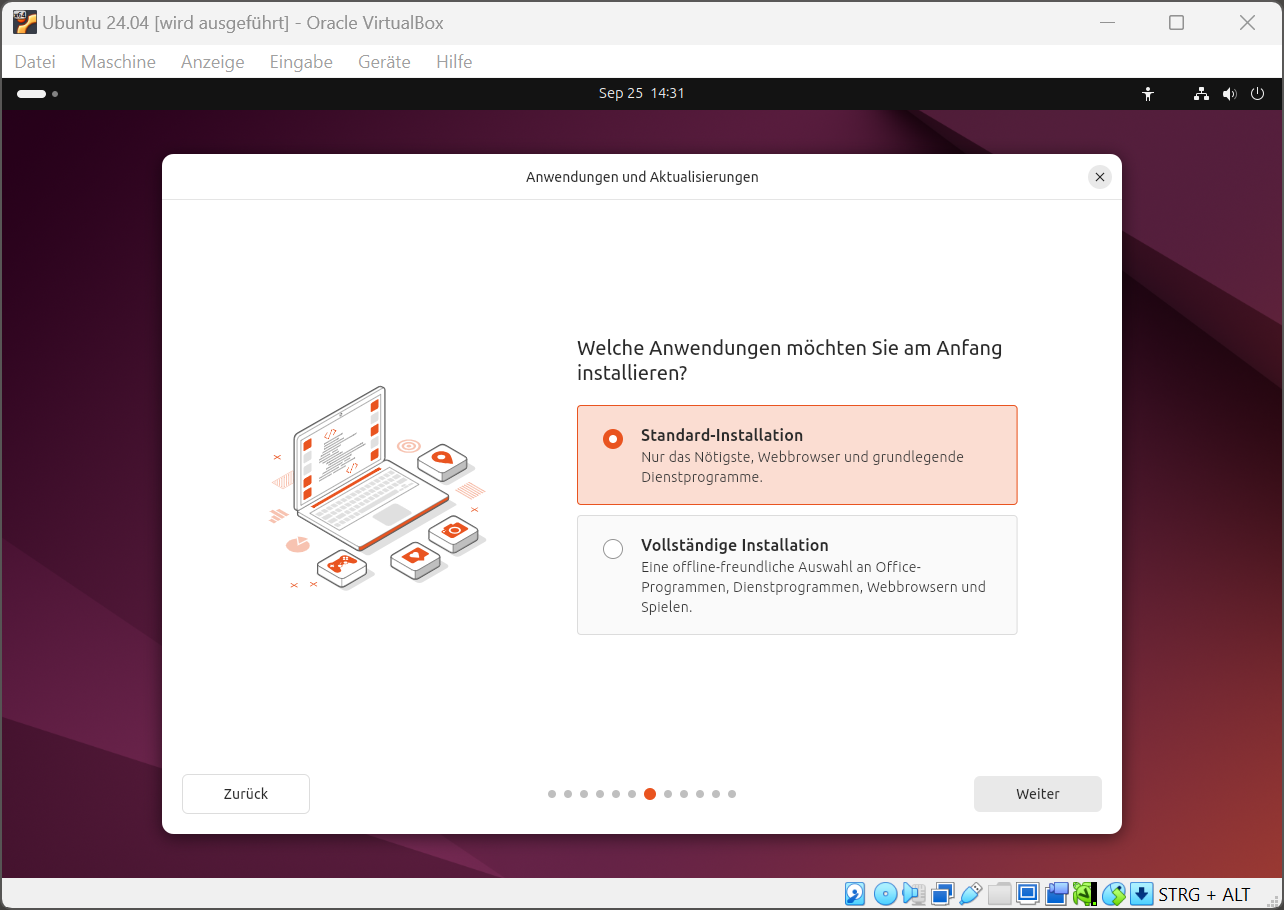
Im Installationsprogramm stellen Sie in den ersten Schritten die gewünschte Sprache und das Tastaturlayout ein. Sie geben an, dass Sie Ubuntu installieren (und nicht nur ausprobieren) möchten, und entscheiden sich für die interaktive Standard-Installation. (Wenn Sie gleich auch Gimp, LibreOffice usw. haben möchten, ist Vollständige Installation die bessere Wahl.)
Mit der »Standard-Installation« werden nur die wichtigsten Programme installiert. Weitere Software können Sie später installieren.
Im nächsten Dialogblatt haben Sie die Option, zusätzliche Treiber sowie Audio- und Video-Codecs zu installieren. Treiber brauchen Sie in der virtuellen Maschine keine, und die fehlenden Codecs können Sie gegebenenfalls später immer noch installieren (sudo apt install ubuntu-restricted-extras).
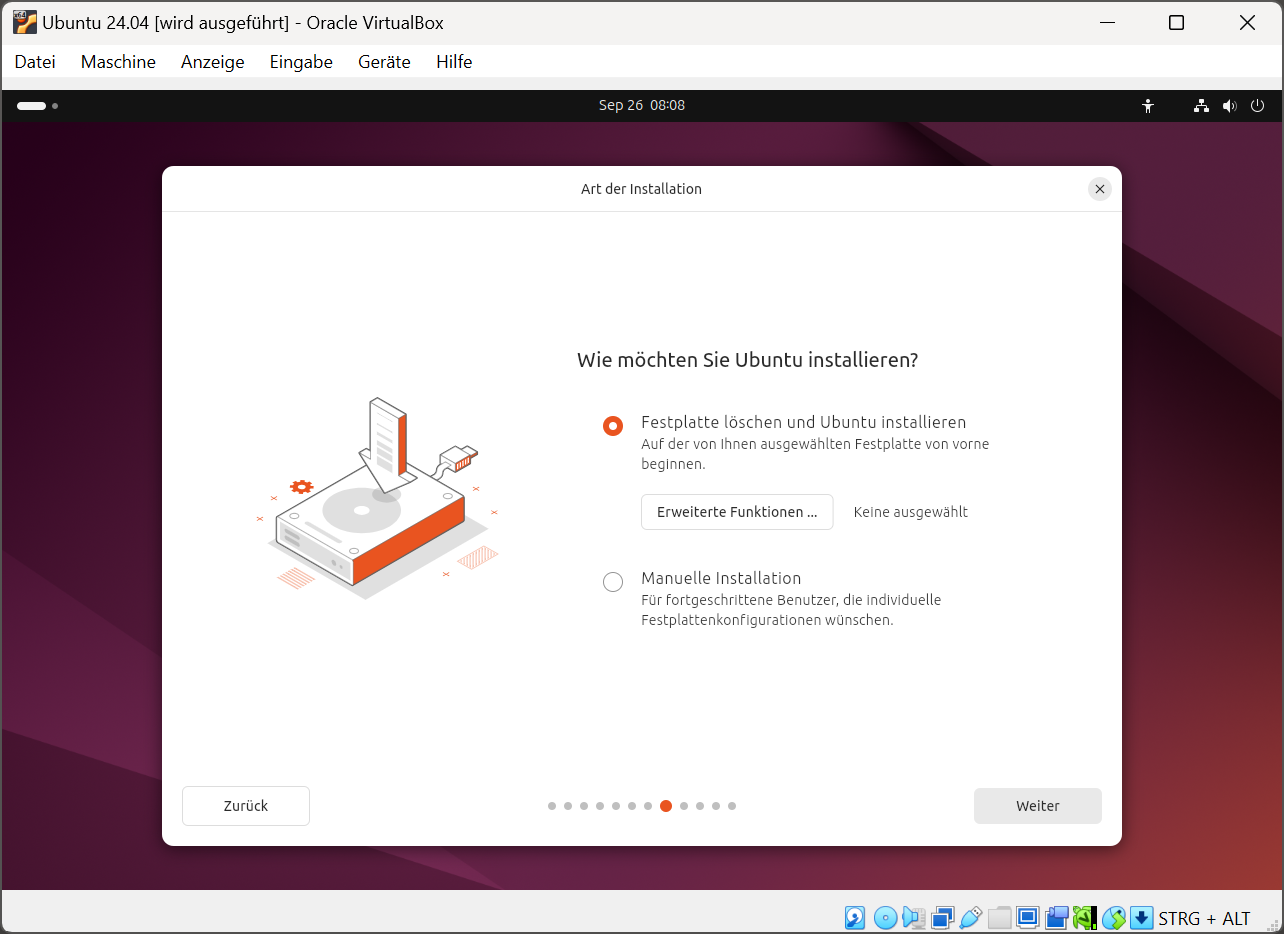
Im Dialogblatt Art der Installation geht es um die Partitionierung der virtuellen Disk sowie um das Einrichten der Dateisysteme für Ubuntu. Weil Sie Ubuntu in eine virtuelle Maschine installieren, müssen Sie keinerlei Rücksicht auf andere Betriebssysteme nehmen und können sich einfach für die Option Festplatte löschen und Ubuntu installieren entscheiden.
In virtuellen Maschinen ist eine manuelle Partitionierung des Datenträgers glücklicherweise überflüssig
Auf der nächsten Seite geben Sie Ihren Namen, den Hostname, den Account-Namen sowie das gewünschte Passwort an. Das nächste Dialogblatt betrifft die Zeitzone, die normalerweise automatisch korrekt eingestellt wird. Zuletzt werden die wichtigsten Einstellungen nochmals zusammengefasst. Installieren startet den Installations-Prozess, der je nach Rechnergeschwindigkeit einige Minuten dauert.
Personalisierung der Installation
Ubuntu nutzen
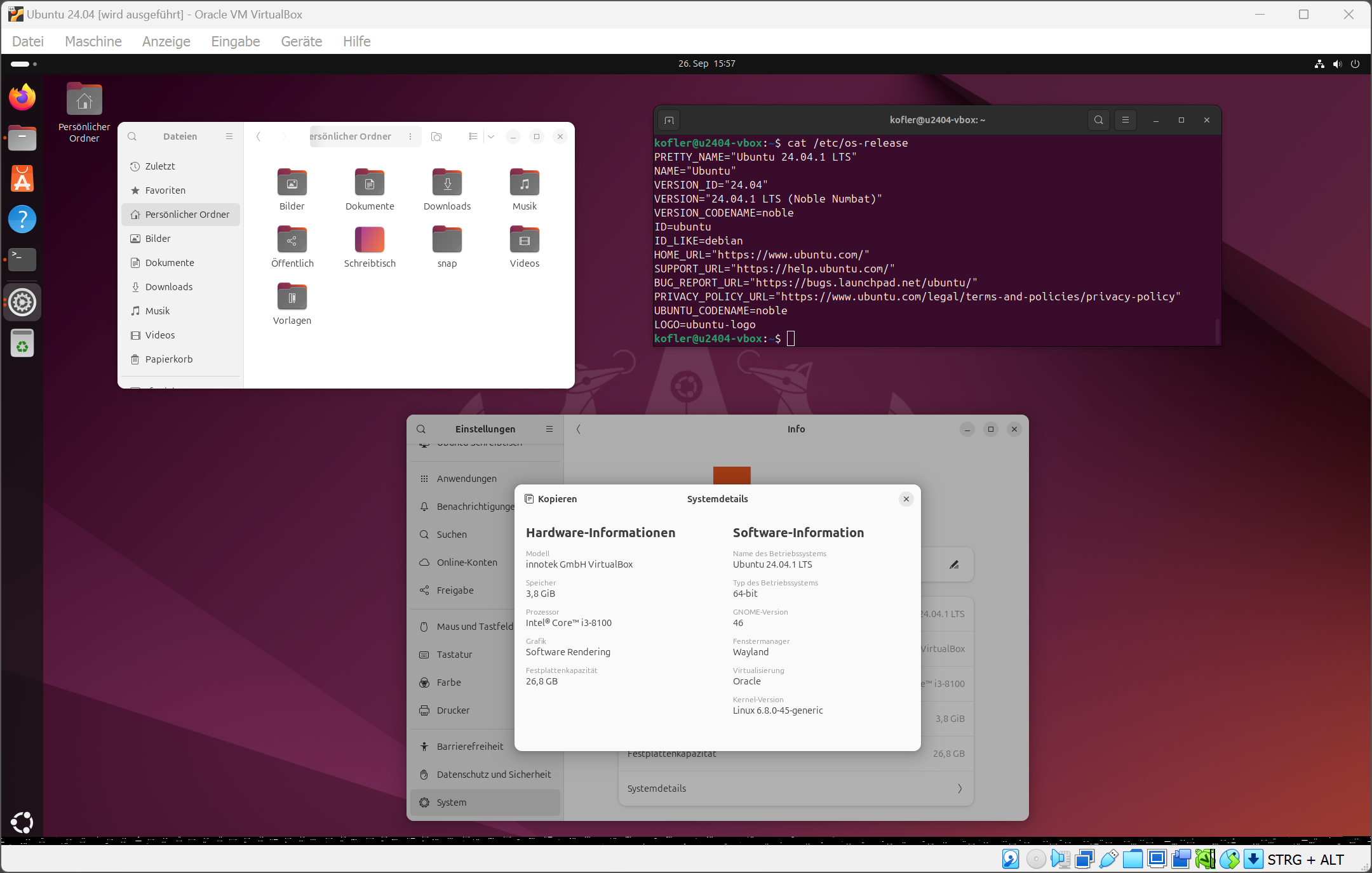
Nach Abschluss der Installation starten Sie die virtuelle Maschine neu und können Ubuntu dann beinahe wie bei einer realen Installation nutzen. Die Auflösung der virtuellen Maschine ändern Sie unkompliziert innerhalb von Ubuntu im Programm Einstellungen, Modul Anzeigegeräte. Wenn Sie einen hochauflösenden Bildschirm verwenden, kann es außerdem zweckmäßig sein, den skalierten Modus zu aktivieren (Anzeige / Skalierter Modus im Menü des Fensters der virtuellen Maschine).
Die virtuelle Maschine verwendet Wayland als Grafiksystem
Installation der VirtualBox-Gasterweiterungen
Um den Datenaustausch zwischen Windows und Ubuntu zu erleichtern, können Sie die VirtualBox-Gasterweiterungen installieren. Dazu sind zwei Schritte erforderlich:
Zuerst führen Sie im Fenster der virtuellen Maschine Geräte / Gasterweiterungen einlegen aus.
Anschließend geben Sie in einem Terminalfenster die folgenden Kommandos ein:
Die Auflösung des Grafiksystems von Ubuntu wird automatisch an die Größe des Fensters der virtuellen Maschine angepasst.
Sie können über die Zwischenablage Text zwischen Windows und Ubuntu austauschen. (Dazu muss außerdem der bidirektionale Modus der Zwischenablage aktiviert werden: im VM-Fenster mit Geräte / Gemeinsame Zwischenablage / Bidirektional.
Sie können über ein gemeinsames Verzeichnis Dateien zwischen Ubuntu und Windows austauschen (Konfiguration siehe unten).
Gemeinsames Verzeichnis zum Dateiaustausch einrichten
Um Dateien zwischen Ubuntu und Windows auszutauschen, richten Sie am besten ein gemeinsames Verzeichnis ein. Drei Schritte sind erforderlich:
Die VirtualBox-Gasterweiterungen sind erforderlich.
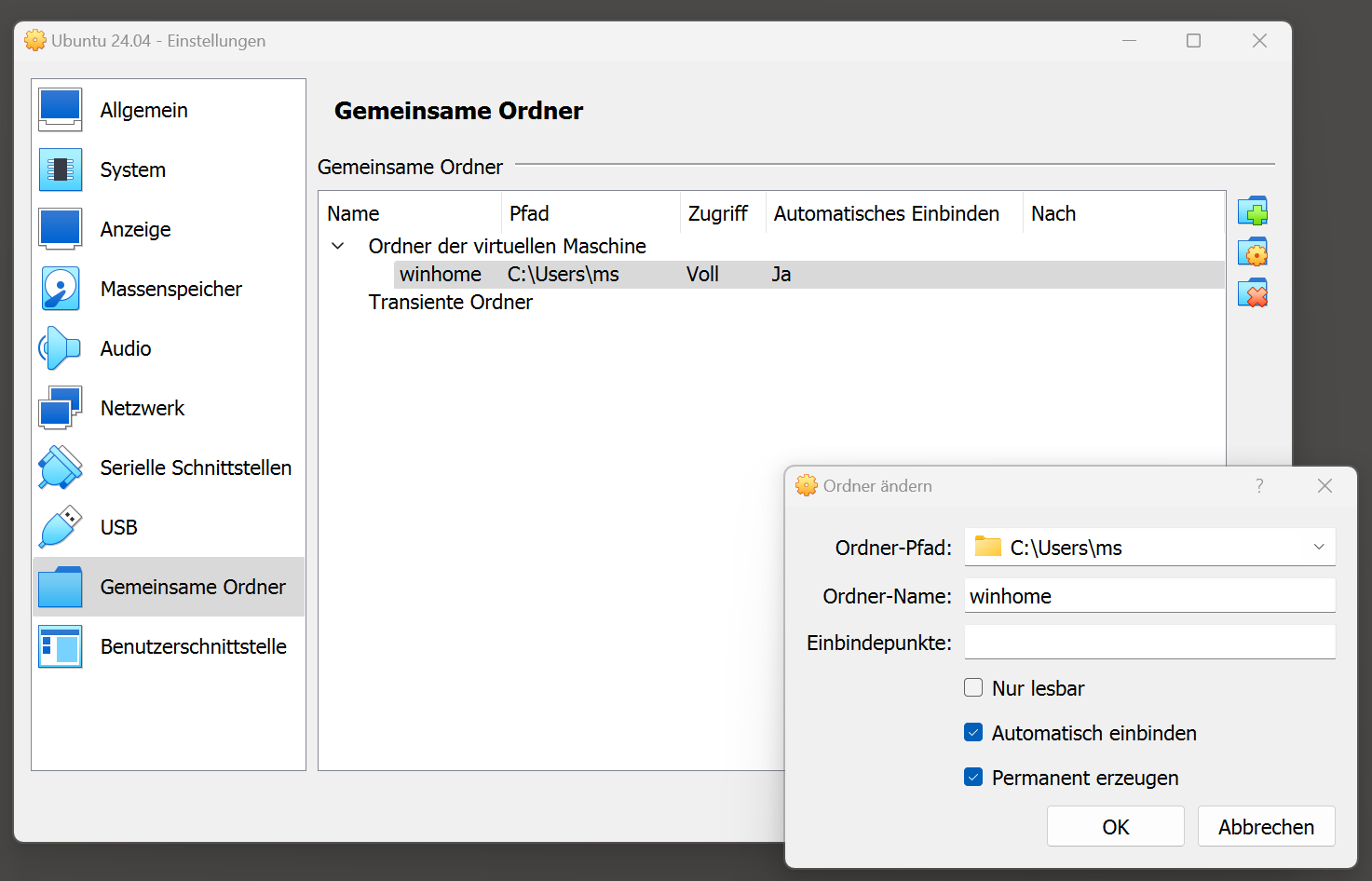
Im Menü des Fensters der virtuellen Maschine führen Sie Geräte / Gemeinsame Ordner / Gemeinsame Ordner aus und wählen ein Windows-Verzeichnis (es kann auch Ihr persönliches Verzeichnis sein). Aktivieren Sie die Optionen Automatisch einbinden und Permanent erzeugen.
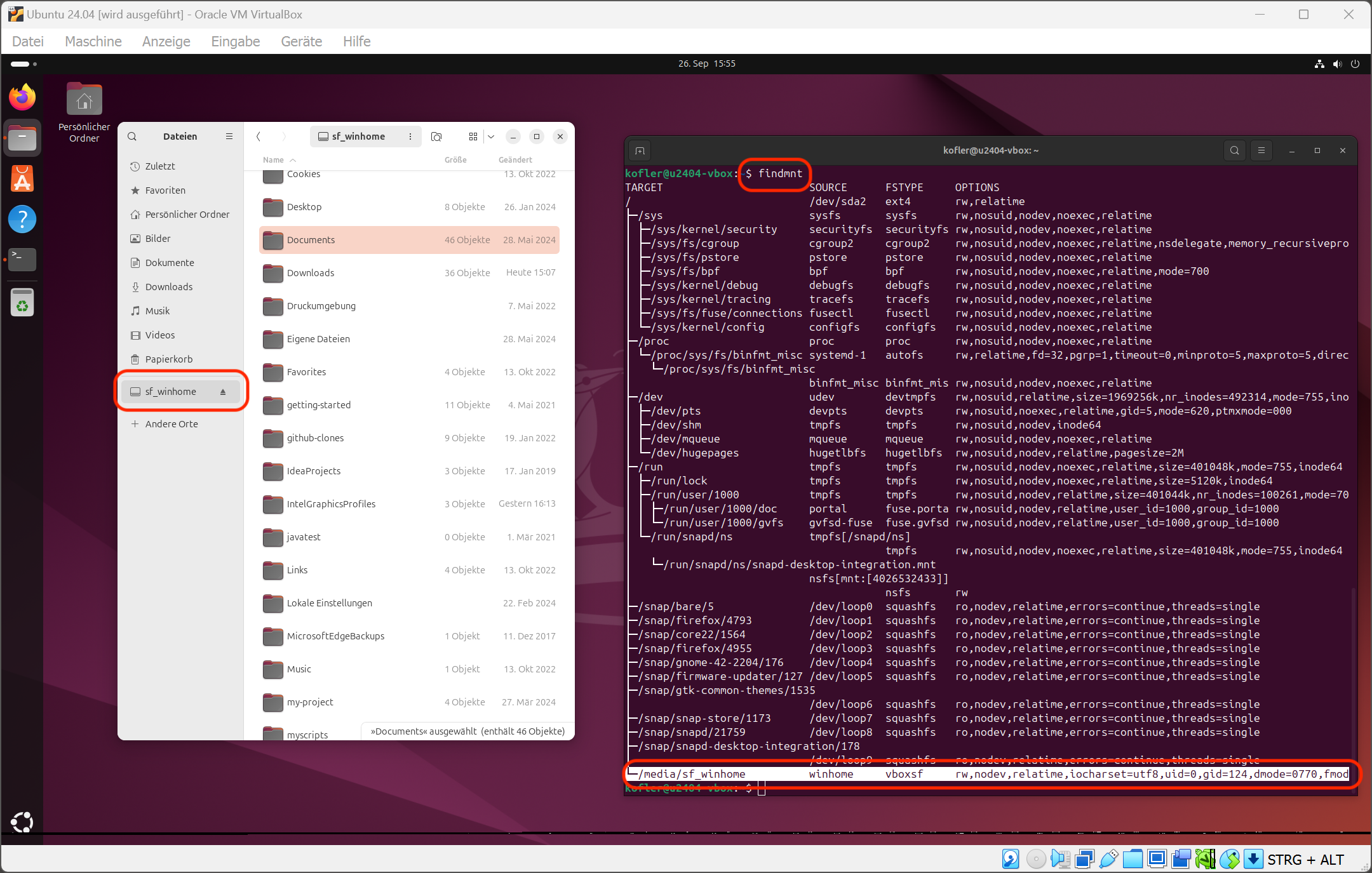
Zuletzt müssen Sie in einem Terminal-Fenster in Ubuntu Ihren Account der vboxsf-Gruppe zuordnen:
sudo usermod -a -G vboxsf $USER
Damit das usermod-Kommando wirksam wird, müssen Sie die virtuelle Maschine neustarten. Sie finden das gemeinsame Verzeichnis danach direkt im Datei-Manager.
Gemeinsamen Ordner zum Dateiaustausch zwischen Windows und der virtuellen Maschine einrichtenDer gemeinsame Ordner wird im Dateimanager angezeigt. Wenn Sie darauf nicht zugreifen können, haben Sie »usermod« vergessen. Für Experten zeigt »findmnt« die Details des Mount-Verzeichnisses.
Netzwerkkonfiguration und SSH-Zugriff
Wenn ich auf Kommandoebene arbeite, bediene ich meine virtuellen Maschinen gerne über SSH. Unter Ubuntu muss dazu der SSH-Server installiert werden, was mit sudo apt install openssh-server rasch gelingt.
Das reicht aber noch nicht: VirtualBox gibt der virtuellen Maschine standardmäßig mittels Network Address Translation Zugriff auf die Netzwerkverbindung des Host-Computers. Die virtuelle Maschine ist aber im Netzwerk des Hosts unsichtbar, eine SSH-Verbindung ist unmöglich.
Es gibt zwei Auswege. Einer besteht darin, in den Netzwerkeinstellungen der virtuellen Maschine die Option Netzwerkbrücke zu aktivieren. Damit wird die virtuelle Maschine einfach zu einem Mitglied im lokalen Netzwerk. Zuhause funktioniert das gut (einfach ssh name@<ubuntu_hostname> ausführen), in öffentlichen WLANs dagegen leider nicht.
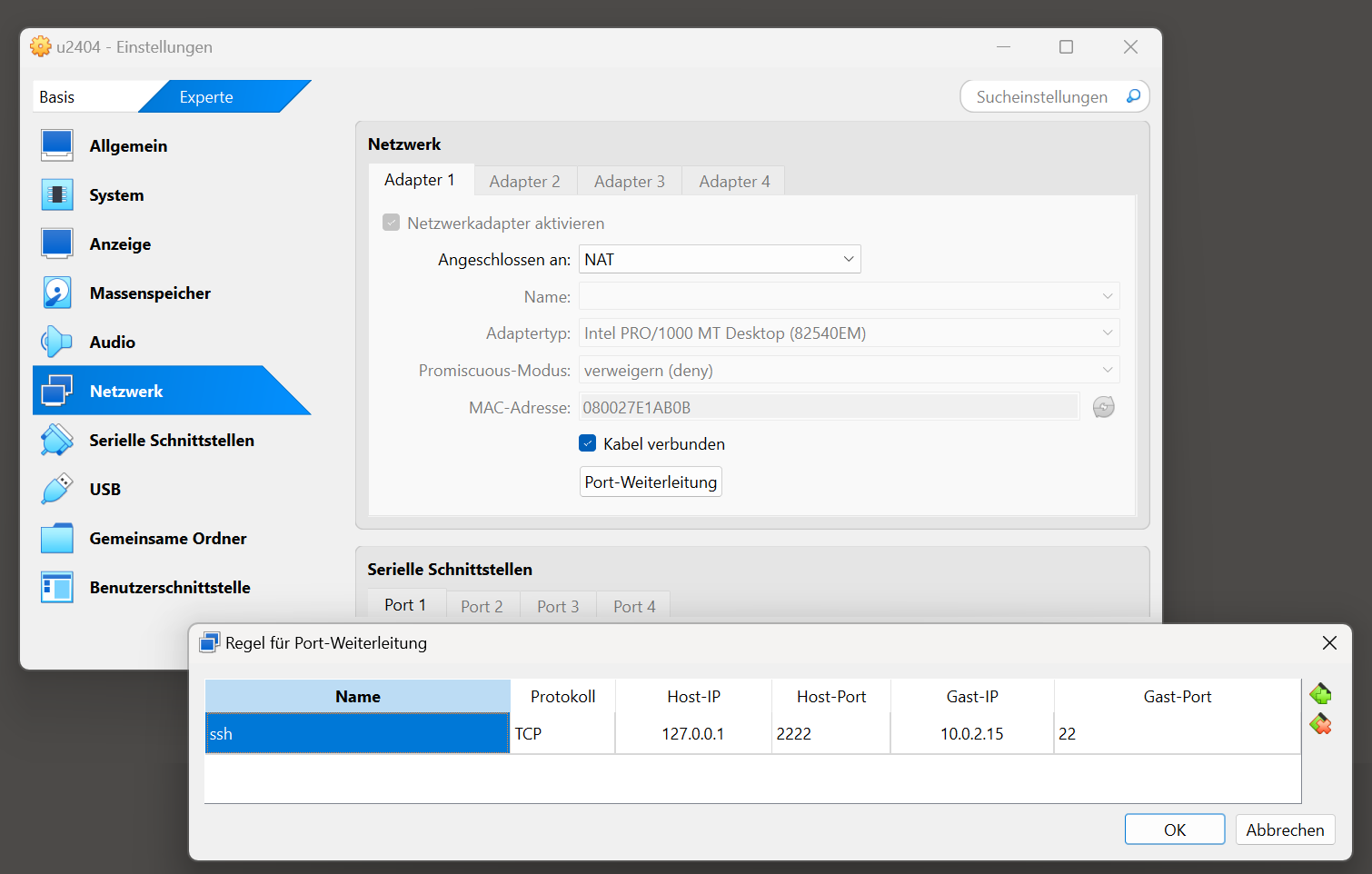
Die Alternative heißt Port-Weiterleitung. Dazu führen Sie im Fenster der virtuellen Maschine Geräte / Netzwerk / Netzwerk-Einstellungen aus, aktivieren das Tab Experte und klappen bei Adapter 1 den Bereich Erweitert aus und klicken auf Port-Weiterleitung. Nun richten Sie eine neue Regel ein, die Port 2222 des Hosts (127.0.0.1) mit Port 22 der virtuellen Maschine (10.0.2.15) verbindet.
Port-Weiterleitung zwischen Port 22 der virtuellen Maschine und Port 2222 des eigenen Rechners einrichten
Nachdem Sie die Einstellungen gespeichert haben (ein Neustart der virtuellen Maschine ist nicht notwendig), können Sie im Terminal von Windows mit dem folgenden Kommando eine SSH-Verbindung zur virtuelle Maschine herstellen:
ssh -p 2222 name@localhost
Wichtig ist dabei die Option -p 2222. ssh soll nicht wie üblich Port 22 verwenden, sondern eben Port 2222. Wichtig ist auch, dass Sie als Zieladresse localhost angeben. Aufgrund der Port-Weiterleitung landen Sie wunschgemäß in der virtuellen Maschine. Anstelle von name geben Sie Ihren Ubuntu-Account-Namen an.
Vielleicht wollen oder können Sie Ubuntu nicht direkt auf Ihr Notebook oder Ihren PC installieren. Dennoch interessieren Sie sich für Linux oder brauchen eine Installation für Schule, Studium oder Software-Entwicklung. Diese Artikelserie fasst drei Wege zusammen, Ubuntu 24.04 virtuell zu nutzen:
Teil I (dieser Text): im Windows Subsystem for Linux (WSL)
Teil III: mit UTM (macOS ARM): mit UTM (macOS ARM)
Windows Subsystem für Linux
Mit WSL hat Microsoft einen Weg geschaffen, Linux im Textmodus unkompliziert unter Windows auszuführen. Diese Variante ist dann empfehlenswert, wenn Sie unter Windows typische Linux-Werkzeuge (die Shell bash, Kommandos wie find und grep usw.) nutzen möchten oder wenn Sie ohne Docker oder virtuelle Maschinen Server-Dienste wie Apache, nginx etc. ausprobieren möchten.
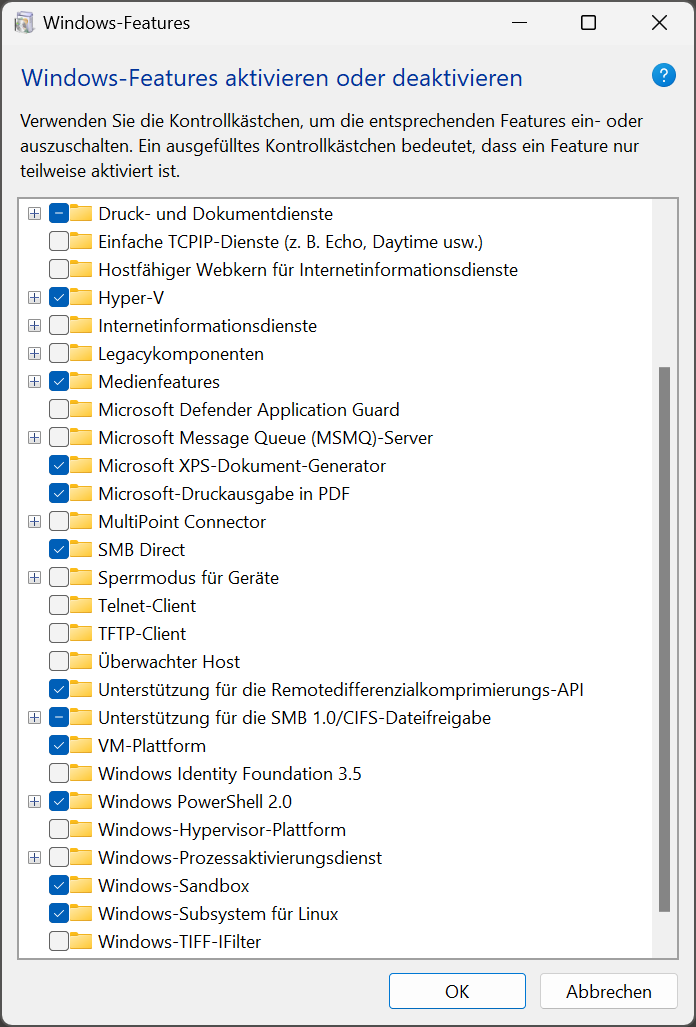
Als erstes müssen Sie sicherstellen, dass im Konfigurationsprogramm Windows-Features aktivieren oder deaktivieren die Optionen Hyper-V und Windows-Subsystem für Linux aktiviert sind. Alternativ können Sie WSL auch im Microsoft Store installieren.
WSL aktivieren
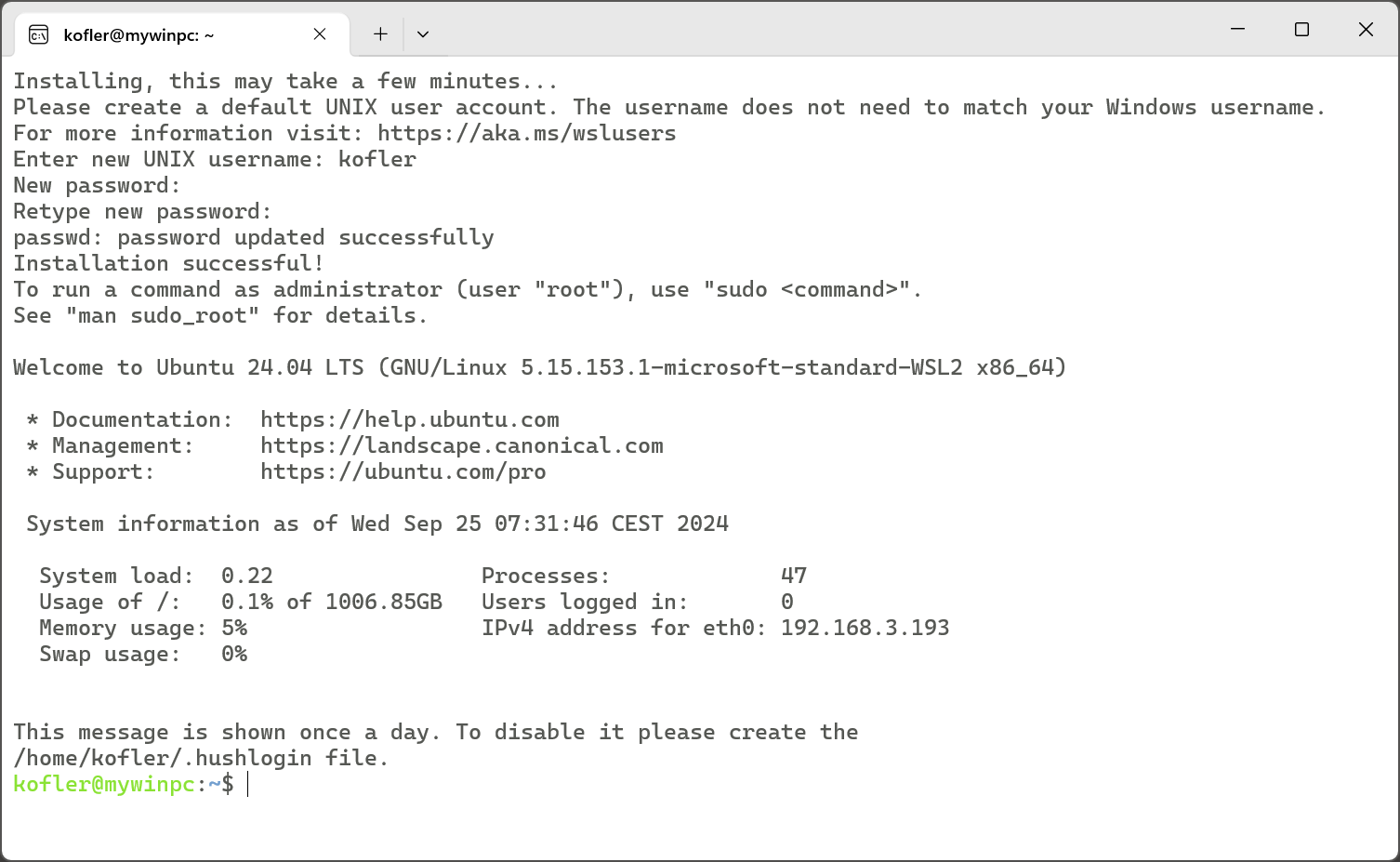
Im zweiten Schritt gehen Sie in den Microsoft Store und suchen nach Ubuntu 24.04. (Passen Sie auf, dass Sie keine alte Version verwenden, die vorher gereiht ist.) Ubuntu 24.04 ist kostenlos. Der Installationsumfang ist mit 350 MByte für eine Linux-Distribution relativ klein. Sobald Sie Öffnen anklicken, erscheint ein Terminal-Fenster. Nach ein paar Sekunden müssen Sie einen Benutzernamen und ein Passwort angeben. Dieses Passwort brauchen Sie später, um administrative Arbeiten zu erledigen (z.B. sudo apt install xxx).
Erster Start von Ubuntu 24.04 unter WSL
In Zukunft können Sie Ubuntu 24.04 im Startmenü oder in der Auswahlliste des Terminal-Programms starten. Als ersten Schritt in der neuen Shell-Umgebung sollten Sie ein Update durchführen (also die Kommandos sudo apt update und sudo apt full-upgrade).
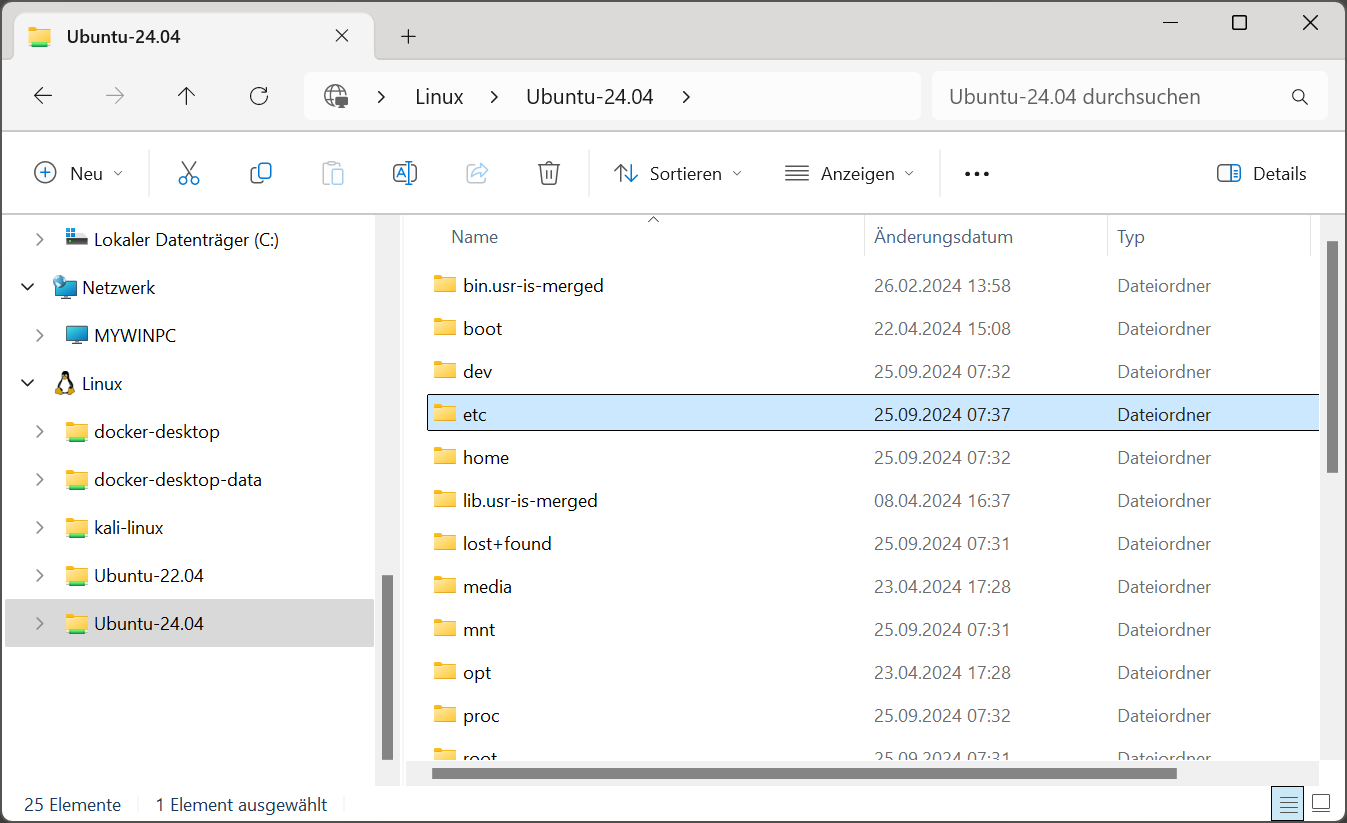
Innerhalb von Ubuntu können Sie über den Pfad /mnt/c auf das Windows-Dateisystem zugreifen. Umgekehrt finden Sie das Linux-Dateisystem im Explorer unter dem Eintrag Linux.
Zugriff auf das Linux-Dateisystem im Explorer
WSL ist für den Betrieb von Linux im Textmodus optimiert. Seit 2021 besteht mit WSLg aber prinzipiell die Möglichkeit, einzelne Programme im Grafikmodus zu installieren und auszuführen:
Meine Erfahrungen mit diesem Feature waren aber nicht überragend. Wenn Sie Ubuntu als Desktop-System im Grafikmodus nutzen möchten, verwenden Sie dazu besser VirtualBox oder ein anderes Virtualisierungssystem.
WSL1, wenn Windows in einer virtuellen Maschine läuft
Aus technischer Sicht gibt es zwei ganz unterschiedliche Varianten von WSL. Standardmäßig kommt WSL2 zum Einsatz. Dabei wird der Linux-Kernel durch das Virtualisierungssystem Hyper-V ausgeführt. In manchen Situationen steht Hyper-V aber nicht zur Verfügung — z.B. wenn Windows selbst in einer virtuellen Maschine läuft (unter Linux oder macOS). In solchen Fällen ist WSL1 ein attraktiver Ausweg. Bei WSL1 kümmert sich ein ganzes Framework von Funktionen um die Kompatibilität zwischen Windows und Linux. WSL1 ist der technisch kompliziertere Weg, weil (fast) alle Linux-Grundfunktionen ohne Virtualisierung nachgebildet wurden.
Um Ubuntu 24.04 unter WSL1 auszuführen, führen Sie die folgenden Kommandos im Terminal aus:
WSL1 hat im Vergleich zu WSL2 einige Nachteile: langsameres I/O, älterer Kernel, keine Grafikfunktionen. Für viele Aufgaben — etwas zum Erlernen grundlegender Linux-Kommandos oder zur bash-Programmierung — funktioniert WSL1 aber genauso gut wie WSL2.
Der aus meiner Sicht größte Nachteil von WSL1 besteht darin, dass systemd nicht funktioniert. Hintergrunddienste wie cron stehen nicht zur Verfügung und können gar nicht oder nur über komplizierte Umwege genutzt werden. Ein wichtiger Teil dessen, was ein komplettes Linux-System ausmacht, fehlt.
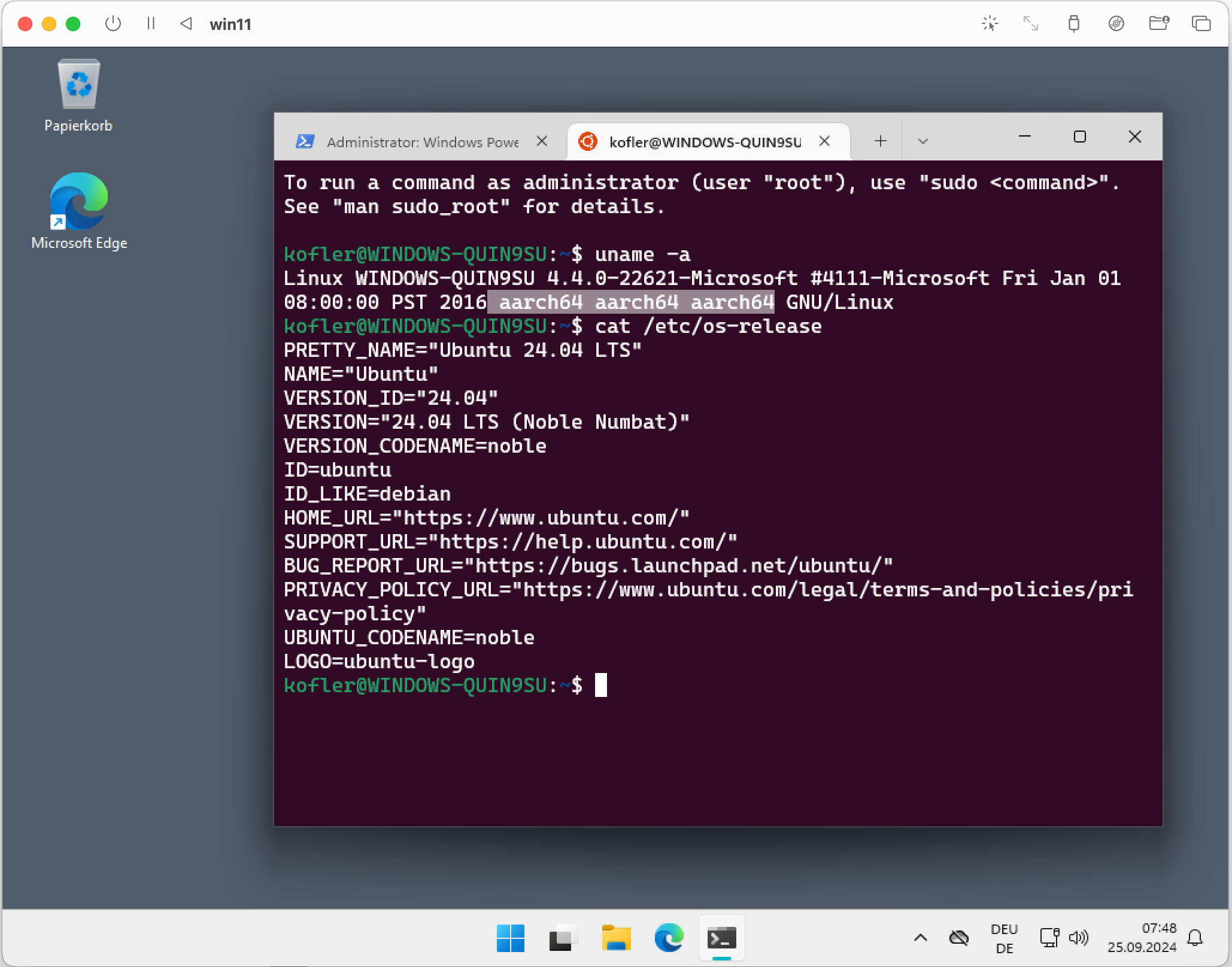
Hier läuft Windows für ARM im Virtualisierungssystem UTM unter macOS. In der virtuellen Maschine ist wiederum Ubuntu 24.04 (auch für ARM) per WSL1 installiert.
Die Aufregung in der Linux-Community wächst, denn sowohl Ubuntu 24.10 als auch Fedora 41 sind nun in der öffentlichen Beta-Phase. Tester und Enthusiasten können sich darauf freuen, die neuesten Funktionen und Verbesserungen dieser beiden beliebten Distributionen auszuprobieren. Ubuntu 24.10 „Oracular Oriole“ Die Beta von Ubuntu 24.10, mit dem Codenamen „Oracular Oriole“, bringt eine Reihe von […]
Das GNOME-Projekt hat die allgemeine Verfügbarkeit von GNOME 46.5 angekündigt. Dies ist das fünfte Wartungsupdate der GNOME 46 “Kathmandu” Desktop-Umgebung. Es behebt mehr Fehler und verbessert die Leistung. GNOME 46.5 wurde wenige Wochen nach GNOME 46.4 veröffentlicht. Es behebt Probleme mit Smartcard-Logins und fügt Benutzerberechtigungen für neue WLAN-Verbindungen hinzu. Auch die Anzeige ausstehender PAM-Nachrichten auf […]
Um effektiv und ungestört Content für meinen Blog zu erstellen, nutze ich gerne die Pomodoro-Technik, die mir 25-minütige Zeitfenster bietet, um konzentriert zu arbeiten.
Nachdem ich jedoch auf meinem Notebook Ubuntu 24.04.1 LTS installiert hatte, begann für mich die Neuorientierung bezüglich entsprechender Software. Die meisten Anwendungen waren schnell gefunden und installiert. Einige Programme und Tools fehlten jedoch in der Version „Noble Numbat“ oder waren nicht lauffähig, worunter die Zufriedenheit am neuen System etwas litt. Ein wichtiges Tool wie Time ++, der Gnome Extensons, funktionierte konnte nicht mehr installiert werden. Nun habe ich festgestellt, dass das alte Projekt in Cronomix umbenannt wurde, welches sich ganz einfach über die Extensions installieren und aktivieren lässt.
Cronomix Pomodoro-Timer
Fazit
Ende gut, alles gut.
Tipp
Mit Cronomix lässt sich auch die Zeit erfassen, in der man an einem Projekt arbeitet.
Voyager Linux 24.04 Gnome ist eine spezielle Linux-Distribution, die auf Ubuntu 24.04 LTS basiert und die beliebte Gnome-Desktop-Umgebung verwendet. Diese Version wurde entwickelt, um ein elegantes, modernes und dennoch stabiles Betriebssystem zu bieten. Sie richtet sich an Benutzer, die sowohl auf Optik als auch auf Leistung Wert legen. Dabei bleibt Voyager leichtgewichtig und flexibel, sodass […]
Zorin OS 17.2 wurde veröffentlicht und bringt viele Verbesserungen. Die Anpassung des Desktops ist nun einfacher mit neuen Optionen wie benutzerdefinierten Cursor-Themes und einem überarbeiteten Fensterverwaltungsbereich. Auch LibreOffice wurde auf eine frische Version aktualisiert, was die Kompatibilität mit Microsoft-Dokumenten und die Leistung verbessert. Weitere Apps wurden vorinstalliert, um Software-Updates zu minimieren. Sicherheits- und Hardwarekompatibilität wurden […]
Die neueste Version des GNOME-Desktops, GNOME 47 “Denver” wurde offiziell veröffentlicht. Diese Version bringt zahlreiche Verbesserungen und neue Funktionen, die das Benutzererlebnis erheblich verbessern. GNOME 47 bietet eine merklich überarbeitete Benutzeroberfläche. Neue Animationen und Effekte sorgen für ein flüssigeres und ansprechenderes Erlebnis. Die Entwickler haben auch die Leistung optimiert, sodass der Desktop schneller und reaktionsfreudiger […]
Im vorherigen Artikel habe ich beschrieben, wie man den Raspberry Pi und den Router konfiguriert, um auf die Nextcloud aus dem Internet zuzugreifen. Da die Verbindung derzeit unverschlüsselt ist, werde ich nun erläutern, wie man eine SSL-Verschlüsselung implementieren und erzwingen kann.
Installation
Zu Beginn installieren wir Certbot, um ein Let’s-Encrypt-Zertifikat zu erstellen.
sudo apt install python3-certbot-apache -y
Der Vorgang wird wie folgt gestartet. Dabei ist es wichtig, die korrekte DynDNS-Adresse (dnsHome.de) anzugeben. Zudem muss eine eMail-Adresse hinterlegt werden.
sudo certbot --apache
Nachdem das Zertifikat ausgestellt wurde, folgt die Konfiguration des VirtualHost. Diesen erstellt man mit dem folgenden Befehl und fügt den unten aufgeführten Block in die Datei /etc/apache2/sites-available/raspi.conf ein.
Dabei müssen die Pfade für das Zertifikat und der Servername an die eigene DynDNS angepasst werden.
Nun werden die nicht mehr benötigten Vorgaben der VirtualHosts deaktiviert, der neue VirtualHost aktiviert und das SSL-Modul des Apache2 eingeschaltet.
Anschließend wird der Webserver erneut neu gestartet.
sudo service apache2 restart
Regelmäßige Erneuerung des SSL-Zertifikats
Ein Let’s Encrypt-Zertifikat sollte monatlich erneuert werden, um sicherzustellen, dass die verschlüsselte Kommunikation auf Ihrer Website kontinuierlich geschützt ist. Die regelmäßige Erneuerung gewährleistet, dass das Zertifikat gültig bleibt und Ihre Websitebesucher vor potenziellen Sicherheitsrisiken wie Man-in-the-Middle-Angriffen geschützt werden.
Linus Torvalds hat die Veröffentlichung von Linux-Kernel 6.11 angekündigt. Diese neue Version bringt einige wichtige Verbesserungen und neue Funktionen mit sich, die vor allem die Stabilität und Sicherheit des Systems erhöhen. Zu den Highlights gehört ein neuer Mechanismus, der dabei hilft, Bluetooth- und WLAN-Chips auf bestimmten Geräten besser zu unterstützen. Außerdem gibt es Optimierungen, die […]
Canonical hat Ubuntu 22.04.5 LTS am 12. September 2024 veröffentlicht. Dies ist das fünfte und letzte geplante Point-Release von Ubuntu 22.04 LTS (Jammy Jellyfish). Es bringt die neuesten Sicherheitsupdates und aktualisierte Komponenten. Ubuntu 22.04.5 LTS kommt sechs Monate nach Ubuntu 22.04.4 LTS. Es ist eine aktuelle Installationsversion für diejenigen, die Ubuntu 22.04 LTS auf einem […]
In der heutigen digitalen Welt sind Datensicherheit und der Schutz der Privatsphäre von zentraler Bedeutung. Mit dem stetigen Anstieg von Cyberangriffen, Überwachungsmaßnahmen und dem Missbrauch von Nutzerdaten ist es entscheidend, ein Betriebssystem zu wählen, das Dir die größtmögliche Kontrolle über Deine Daten gibt und Dich vor unerwünschten Zugriffen schützt. Während Windows auf vielen Computern das […]
Möchte man den Hashwert eines Ubuntu-Images mit Hilfe der Prüfsumme überprüfen, geht man wie folgt vor.
Zuerst wird das Ubuntu-Image und die dazugehörige SHA256SUMS-Datei herunter geladen. Beide Dateien sollten sich im gleichen Verzeichnis befinden.
Ubuntu Release ServerUbuntu Release Server (Ubuntu 24.04.1 LTS)
Prüfsummencheck
Danach führt man folgenden Befehl in diesem Verzeichnis aus, um die Prüfziffern zu checken.
sha256sum -c SHA256SUMS 2>&1 | grep OK
Intergritätsprüfung am Terminal
Wenn alles in Ordnung ist wird dies mit „OK“ bestätigt.
Wozu das Ganze?
Diese Art von Integritätsprüfung stellt sicher, dass das ISO-Image korrekt heruntergeladen wurde und dass die lokale Datei eine genaue Kopie der auf den Download-Servern gespeicherten Datei ist. Ein Fehler beim Download könnte zu einer beschädigten Datei führen, die bei der Installation unerwartete Probleme verursachen kann.
Weitere Beispiele
Das Ganze lässt sich natürlich auch auf andere Betriebssystem-Images anwenden.
Intergritätsprüfung am Terminal (Beispiel: Raspberry Pi OS)Intergritätsprüfung am Terminal (Beispiel: Linux Mint 22)