DietPi verbessert Hardware-Support
DietPi ist in der neuen Hauptversion 9.0 erschienen. Die bringt Unterstützung für die 1,5 GB Version des Orange Pi Zero 3, Verbesserungen für andere Boards und Fehlerbehebungen mit.
DietPi ist in der neuen Hauptversion 9.0 erschienen. Die bringt Unterstützung für die 1,5 GB Version des Orange Pi Zero 3, Verbesserungen für andere Boards und Fehlerbehebungen mit.
Das ist der dritte Teil einer Mini-Serie zur GPIO-Nutzung am Raspberry Pi 5:
Genau genommen hat die Kamera-Nutzung nicht unmittelbar etwas mit GPIOs zu tun. Allerdings ist für die Kommunikation mit der Kamera ebenfalls der neu im Pi 5 integrierte RP1-Chip verantwortlich. Der Chip ist der Grund, weswegen alte Kamera-Tools auf dem Raspberry Pi 5 nicht mehr funktionieren. Bevor Sie zu schimpfen beginnen: Der RP1 hat viele Vorteile. Unter anderem können Sie nun zwei Kameras gleichzeitig anschließen und nutzen und höhere Datenmengen übertragen (wichtig für Videos).
Beachten Sie, dass Sie beim Raspberry Pi 5 zum Kamera-Anschluss ein neues, schmaleres Kabel benötigen!

Im Terminal bzw. in Bash-Scripts funktionieren raspistill, raspivid usw. nicht mehr. Sie müssen stattdessen rpicam-still, rpicam-vid etc. einsetzen.
In Python-Scripts müssen Sie Abschied vom picamera-Modul nehmen. Stattdessen gibt es das vollkommen neue Modul Picamera2. Es bietet (viel) mehr Funktionen, ist aber in der Programmierung komplett inkompatibel. Vorhandene Scripts können nicht portiert werden, sondern müssen neu entwickelt werden.
Sowohl die rpicam-xxx-Kommandos als auch das Picamera2-Modul greifen auf die ebenfalls neue Bibliothek libcamera2 zurück.
Im einfachsten Anwendungsfall erzeugen Sie ein Picamera2-Objekt, machen mit der Methode start_and_capture_file ein Foto und speichern dieses in eine Datei. Dabei kommt die volle Auflösung der Kamera zur Anwendung, beim Camera Module 3 immerhin fast 4600×2600 Pixel.
#!/usr/bin/env python3
# Beispieldatei camera.py
from picamera2 import Picamera2
cam = Picamera2()
# ein Foto machen und speichern
cam.start_and_capture_file("test.jpg")
Anstelle von start_and_capture_file gibt es zwei weitere Methoden, um ebenso unkompliziert Bilderfolgen bzw. Videos aufzunehmen:
# 10 Bilder im Abstand von 0,5 Sekunden aufnehmen
# mit Dateinamen in der Form series-0003.jpg
cam.start_and_capture_files("series-{:0>4d}.jpg",
num_files=10,
delay=0.5)
# Video über 10 Sekunden aufnehmen (640x480 @ 30 Hz, H.264/AVC1)
cam.start_and_record_video("test.mp4", duration=10)
Zum Test der Kamera sowie zur Aufnahme von Bildern und Videos stehen die folgenden neuen Kommandos zur Auswahl:
rpicam-jpeg, Optionen etwas kompatibler zu raspistill)Die Kommandos sind mit all ihren Optionen großartig dokumentiert. Es gibt zwar keine man-Seiten, aber dafür liefern die Kommandos mit der Option -h eine lange Liste aller Optionen (z.B. rpicam-still -h). Ich beschränke mich hier auf einige einfache Anwendungsbeispiele.
# fünf Sekunden lang ein Vorschaufenster anzeigen, dann
# ein Foto aufnehmen und speichern
rpicam-jpeg -o image.jpg
# ohne Vorschau, Aufnahme nach einer Sekunde (1000 ms)
rpicam-jpeg -n -t 1000 -o image.jpg
# wie oben, aber Debugging-Ausgaben nicht anzeigen
rpicam-jpeg -n -t 1000 -v 0 -o image.jpg
# Bildgröße 1280x800
rpicam-jpeg --width 1280 --height 800 -o image.jpg
# heller/dunkler (EV Exposure Compensation)
rpicam-jpeg --ev 0.5 -o brighter.jpg
rpicam-jpeg --ev -0.5 -o darker.jpg
# erstellt ein 10 Sekunden langes Video (10.000 ms)
# 640x480@30Hz, H264-Codec
rpicam-vid -t 10000 -o test.mp4
# wie vorher, aber höhere Auflösung
rpicam-vid --width 1024 --height 768 -t 10000 -o test.mp4
Falls Sie mehr als eine Kamera angeschlossen haben, können Sie diese mit rpicam-hello --list-cameras auflisten. Die bei einer Aufnahme gewünschte Kamera können Sie mit der Option rpicam-xxx --camera <n> festlegen.
picamera2 ist ein relativ neues Python-Modul. Es ersetzt das früher gebräuchliche Modul picamera. Der Hauptvorteil von picamera2 besteht darin, dass das Modul zu aktuellen Raspberry-Pi-Modellen kompatibel ist. Beim Raspberry Pi 5 kommt picamera2 auch mit dem Fall zurecht, dass Sie zwei Kameras gleichzeitig an Ihren Minicomputer angeschlossen haben.
Eine umfassende Referenz aller Klassen und Methoden finden Sie in der exzellenten Dokumentation (nur im PDF-Format verfügbar), die allerdings weit mehr technische Details behandelt, als Sie jemals brauchen werden. Eine Menge Beispiel-Scripts finden Sie auf GitHub.
Mit create_still_configuration können Sie in diversen optionalen Parametern Einstellungen vornehmen. Das resultierende Konfigurationsobjekt übergeben Sie dann an die configure-Methode. Wichtig ist, dass Sie das Foto nicht mit start_and_capture_file aufnehmen, sondern dass Sie die Methoden start und capture_file getrennt ausführen. Die folgenden Zeilen zeigen, wie Sie ein Bild in einer Auflösung von 1024×768 Pixel aufnehmen. Die sleep-Aufforderung verbessert die Qualität des Bilds. Sie gibt der Kamera-Software etwas Zeit, um die Aufnahme zu fokussieren und richtig zu belichten.
#!/usr/bin/env python3
from picamera2 import Picamera2, Preview
import time
# ein Foto in reduzierter Auflösung aufnehmen
cam = Picamera2()
myconfig = cam.create_still_configuration(
main={"size": (1024, 768)} )
cam.configure(myconfig)
cam.start()
time.sleep(0.5)
cam.capture_file("1024x768.jpg")
Mit Transformationen können Sie das aufgenommene Bild vertikal und horizontal spiegeln. Falls Sie die Kamerakonfiguration während der Ausführung eines Scripts ändern möchten, müssen Sie die Kamera vorher stoppen und danach neu starten.
# (Fortsetzung des obigen Listings)
cam.stop()
from libcamera import Transform
mytrans = Transform(hflip=True)
myconfig = cam.create_still_configuration(
main={"size": (1024, 768)},
transform=mytrans)
cam.configure(myconfig)
cam.start()
time.sleep(0.5)
cam.capture_file("1024x768-hflip.jpg")
Bei der Aufnahme von Videos haben Sie die Wahl zwischen drei Encodern, die die aufgenommenen Bilder in Video-Dateien umzuwandeln:
H264Encoder (Hardware-Encoder für H.264, kommt per Default zum Einsatz, max. 1080p@30 Hz)MJPEGEncoder (Hardware-Encoder für Motion JPEG = MJPEG)JpegEncoder (Software-Encoder für MJPEG) Hardware-Encoding steht nur auf dem Raspberry Pi 4 (H.264 und MJPEG) und dem Raspberry Pi 5 (nur H.264) zur Verfügung. Beim Raspberry Pi 5 läuft der MJPEGEncoder also per Software.
Das folgenden Script soll ein Video im Format 720p aufnehmen und gleichzeitig ein Vorschaubild anzeigen. Dabei soll der H.264-Codec eingesetzt werden.
#!/usr/bin/env python3
from picamera2 import Picamera2, Preview
from picamera2.encoders import H264Encoder, Quality
import time
cam = Picamera2()
myconfig = cam.create_video_configuration(
main={"size": (1280, 720)}) # Auflösung 720p
myencoder = H264Encoder()
cam.configure(myconfig)
cam.start_preview(Preview.QTGL)
time.sleep(0.5)
cam.start_recording(myencoder,
"test-720p.mp4",
quality=Quality.MEDIUM)
time.sleep(10)
cam.stop_recording()
cam.stop_preview()
Das Script zeigt zwar keine Fehlermeldungen an, allerdings lässt sich die Video-Datei nicht abspielen, weder mit VLC am Raspberry Pi noch mit anderen Video-Playern auf anderen Rechnern. Ich habe tagelang mit den Video-Funktionen von Picamera2 experimentiert, aber die resultierenden Videos waren meist schwarz oder enthielten nur ein Bild, das am Beginn der Aufnahme entstanden ist. Auch die auf der folgenden Seite gesammelten Beispiel-Scripts zum Video-Recording funktionierten bei meinen Tests entweder gar nicht oder nur mit Einschränkungen:
https://github.com/raspberrypi/picamera2/tree/main/examples
Fazit: Die Video-Funktionen von Picamera2 sind aktuell (Anfang 2024) ebenso ambitioniert wie unausgereift. Es ist zu hoffen, dass neue Versionen von libcamera und Picamera2 und eine bessere Dokumentation der Grundfunktionen in Zukunft Abhilfe schaffen. Was nützen coole Spezial-Features, wenn es schon bei den einfachsten Grundfunktionen Probleme gibt?
Unter dem Motto „Zeichen setzen“ finden am 16. und 17. März 2024 wieder die Chemnitzer Linux-Tage statt. Die Veranstalter hoffen wieder auf einen großen Zuspruch im Hörsaalgebäude der TU Chemnitz an der Reichenhainer Straße.
Eintrittskarten zur Veranstaltung wird es im Vorverkauf geben. Da die Anzahl der Tickets aber begrenzt ist, wird es an der Tageskasse nur Restkarten geben.
Auch 2024 haben sich die Chemnitzer Linux-Tage einen Platz an einem März-Wochenende gesucht. Also Kalender gezückt und den 16. und 17. März 2024 dick einkreisen! Es lohnt sich bestimmt.
Eintrittskarten sind an der Tageskasse erhältlich.
Wir freuen uns sehr, euch im März vor Ort in Chemnitz in gewohnter Umgebung wiederzusehen. Über unsere Pressemitteilungen, Social Media könnt ihr euch diesbezüglich auf dem Laufenden halten.
Quelle: chemnitzer.linux-tage.de
Das ist der zweite Teil einer Mini-Serie zur GPIO-Nutzung am Raspberry Pi 5:
Zu den wichtigsten Neuerungen beim Raspberry Pi 5 zählt nicht nur der viel schnellere SoC (System-on-a-Chip), sondern auch ein eigener I/O-Controller, der als eigener Chip realisiert ist (RP1). Dieser I/O-Chip bringt mit sich, dass etablierte Mechanismen zur GPIO-Steuerung nicht mehr funktionieren. Besonders stark betroffen sind Kommandos, die im Terminal oder in Bash-Scripts aufgerufen werden.
Im Verlauf eines Jahrzehnts haben sich diverse Kommandos etabliert, die mittlerweile veraltet sind. Dazu zählt das Kommando gpio aus dem WiringPi-Projekt, das bereits 2019 eingestellt wurde. Ebenfalls verabschieden müssen Sie sich von dessen Nachfolger-Kommando raspi-gpio: Das Kommando ist nicht mit dem neuen I/O-Chip RP1 kompatibel. Glücklicherweise lässt sich das Kommando relativ einfach durch pinctrl ersetzen.
Deutlich ärgerlicher ist, dass auch der beliebte Dämon pigpiod und das dazugehörende Kommando pigs der Kompatibilität zu RP1 zum Opfer gefallen ist. Absurderweise kann der Dienst Anfang 2024 im Raspberry-Pi-Konfigurationsprogramm als GPIO-Fernzugriff scheinbar weiterhin aktiviert werden.
journalctl -u pigpiod beweist aber, dass der Dienst nicht funktioniert:
journalctl -u pigpiod
systemd[1]: Starting pigpiod.service - Daemon required to control GPIO pins via pigpio...
systemd[1]: Started pigpiod.service - Daemon required to control GPIO pins via pigpio.
pigpiod[88161]: 2023-12-29 11:02:24 gpioHardwareRevision: unknown rev code (d04170)
pigpiod[88161]: 2023-12-29 11:02:24 initCheckPermitted:
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: |Sorry, this system does not appear to be a raspberry pi. |
pigpiod[88161]: |aborting. |
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: Can't initialise pigpio library
systemd[1]: pigpiod.service: Main process exited, code=exited, status=1/FAILURE
systemd[1]: pigpiod.service: Failed with result 'exit-code'.
Das Problem ist bekannt, aber es sieht nicht so aus, als könnte es behoben werden: https://github.com/joan2937/pigpio/issues/589
Welche Kommandos funktionieren dann noch? Sie haben die Wahl zwischen den gpioxxx-Kommandos aus dem Paket gpiod sowie pinctrl (siehe den folgenden Abschnitt). Das Paket gpiod ist standardmäßig installiert. Die darin enthaltenen Kommandos nutzen zur Kommunikation mit dem Kernel die Device-Dateien /dev/gpiochip<n> und die Bibliothek libgpiod2.
Der größte Nachteil der Kommandos gpioget, gpioset usw. besteht darin, dass Sie als ersten Parameter die GPIO-Chip-Nummer angeben müssen. Diese variiert je nach Raspberry-Pi-Modell. Bei den Modellen der Serie 1 bis 4 müssen Sie die Nummer 0 angeben, ab Modell 5 die Nummer 4.
# LED ein- und ausschalten, die über den GPIO 7 gesteuert wird
# (= Pin 26 des J8-Headers)
# gpioset auf dem Raspberry Pi 5
gpioset 4 7=1; sleep 3; gpioset 4 7=0
# gpioset auf dem Raspberry Pi 1 bis 4
gpioset 0 7=1; sleep 3; gpioset 0 7=0
Warum variiert die GPIO-Chip-Nummer? Weil beim Raspberry Pi 4 die Kernel-Schnittstelle /dev/gpiochip0 für die GPIO-Steuerung verantwortlich ist (das sind in den BCM 2711 integrierte Funktionen), beim Pi 5 aber der RP1 (ein externer Chip) mit der Kernel-Schnittstelle /dev/gpiochip4. Informationen darüber, welche GPIO-Schnittstellen es gibt und welche GPIO-Funktion wie »verdrahtet« ist, geben die Kommandos gpiodetect und gpioinfo. Die folgenden Ausgaben gelten für den Raspberry Pi 5:
gpiodetect
gpiochip0 [gpio-brcmstb@107d508500] (32 lines)
gpiochip1 [gpio-brcmstb@107d508520] ( 4 lines)
gpiochip2 [gpio-brcmstb@107d517c00] (17 lines)
gpiochip3 [gpio-brcmstb@107d517c20] ( 6 lines)
gpiochip4 [pinctrl-rp1] (54 lines)
gpioinfo
gpiochip0 - 32 lines:
line 0: "-" unused input active-high
line 1: "2712_BOOT_CS_N" "spi10 CS0" output active-low
line 2: "2712_BOOT_MISO" unused input active-high
...
gpiochip1 - 4 lines:
line 0: "WIFI_SDIO_D0" unused input active-high
line 1: "WIFI_SDIO_D1" unused input active-high
...
gpiochip2 - 17 lines:
line 0: "RP1_SDA" unused input active-high
line 1: "RP1_SCL" unused input active-high
line 2: "RP1_RUN" "RP1 RUN pin" output active-high
...
gpiochip3 - 6 lines:
line 0: "HDMI0_SCL" unused input active-high
line 1: "HDMI0_SDA" unused input active-high
...
gpiochip4 - 54 lines:
line 0: "ID_SD" unused input active-high
line 1: "ID_SC" unused input active-high
line 2: "PIN3" unused input active-high
line 3: "PIN5" unused input active-high
line 4: "PIN7" "onewire@0" output active-high
line 5: "PIN29" "onewire@0" output active-low
line 6: "PIN31" unused input active-high
line 7: "PIN26" unused input active-high
line 8: "PIN24" unused input active-high
line 9: "PIN21" unused input active-high
line 10: "PIN19" unused input active-high
...
line 28: "PCIE_RP1_WAKE" unused input active-high
line 29: "FAN_TACH" unused input active-high
line 30: "HOST_SDA" unused input active-high
line 31: "HOST_SCL" unused input active-high
line 32: "ETH_RST_N" "phy-reset" output active-low
...
Um Scripts zu programmieren, die universell funktionieren, können Sie die folgenden Zeilen in den Code einbauen:
# chip=4 für RPi5, chip=0 für ältere Modelle
if gpiodetect | grep -q "pinctrl-rp"; then
chip=4
else
chip=0
fi
In der einfachsten Form schalten Sie mit gpioset einen GPIO-Ausgang auf High oder Low. In den folgenden Beispielen bezieht sich der erste Parameter auf die gpiochip-Nummer. 7 gibt die GPIO-Nummer in BCM-Nomenklatur an, 1 oder 0 den gewünschten Zustand:
gpioset $chip 7=1 # GPIO 7 (Pin 26) auf High stellen
gpioset $chip 7=0 # GPIO 7 (Pin 26) auf Low stellen
Sie können auch mehrere Ausgänge auf einmal steuern (hier GPIO 7, 8 und 25):
gpioset $chip 7=0 8=1 25=0
Durch diverse Optionen können Sie weitere Funktionen steuern (siehe auch man gpioset):
--bias=as-is|disable|pull-down|pull-up aktiviert die internen Pull-up- oder Pull-down-Widerstände.
--mode=exit|wait|time|signal gibt an, wie lange das Kommando laufen soll. Standardmäßig gilt exit, das Kommando wird also sofort beendet. Mit wait wartet das Programm, bis der Benutzer [Return] drückt. Bei der Einstellung time können Sie mit --sec=<n> oder --usec=<n> die gewünschte Wartezeit einstellen. signal bedeutet, dass das Programm weiterläuft, bis es mit [Strg]+[C] beendet wird.
--background führt das Kommando als Hintergrunddienst weiter.
gpioget funktioniert analog zu gpioset: Sie übergeben im ersten Parameter die gpiochip-Nummer (in aller Regel 0), im zweiten Parameter die BCM-Nummer des GPIOs, dessen Input Sie auswerten wollen. Das Ergebnis des Kommandos lautet 0 oder 1, je nachdem, welchen Zustand der Eingang hat.
gpioget $chip 9 # Zustand von GPIO 9 (Pin 21) auslesen
0
Auch mit pinctrl aus dem Paket raspi-utils können Sie GPIO-Funktionen steuern. Der Vorteil von pinctrl besteht darin, dass das Kommando zur Zeit mit allen Raspberry-Pi-Modellen kompatibel ist. Eine Fallunterscheidung, ob das Script auf einem alten oder neuen Modell mit RP1-Chip läuft, entfällt. Außerdem ist das Kommando syntaktisch weitestgehend zu raspi-gpio kompatibel.
Gegen den Einsatz des Kommandos spricht der Umstand, dass das Kommando laut pinctrl -h (der einzigen mir bekannten Dokumentation) nur für Debugging-Zwecke gedacht ist.
Die folgende Aufzählung fasst die wichtigsten Anwendungen des Kommandos zusammen:
pinctrl get [gpionr] ermittelt den aktuellen Status aller GPIOs bzw. des angegebenen GPIOs.
pinctrl funcs [gpionr] ermittelt, welche alternativen Funktionen der angegebene GPIO bzw. alle GPIOs erfüllen können.
pinctrl set gpionr options verändert den Status des angegeben GPIOs. Mögliche Optionen sind:
ip = Inputop = Outputdl = Zustand Low (Drive Low)dh = Zustand High (Drive High)pu = Pull-up-Widerstand aktivpd = Pull-down-Widerstand aktivpn = keine Pull-up/down-Funktiona0 bis a7 = alternative Funktion n aktivierenno = Deaktivieren (no function)Soweit sich sinnvolle Kombinationen ergeben, dürfen mehrere der obigen Optionen auf einmal übergeben werden, jeweils getrennt durch Leerzeichen. Welche alternative Funktionen ein GPIO unterstützt und wie sie nummeriert sind, geht aus pinctrl funcs hervor.
Das folgende Kommando ermittelt, welche Funktionen der GPIO mit der BCM-Nummer 23 unterstützt. Auf dem Raspberry Pi ist dieser GPIO mit Pin 16 des J8-Headers verbunden. GPIO23 kann diverse Funktionen übernehmen:
pinctrl funcs 23
23, PIN16/GPIO23, SD0_CMD, DPI_D19, I2S0_SDO1, SCL3,
I2S1_SDO1, SYS_RIO023, PROC_RIO023, PIO23
Wenn Sie über Pin 26 (BCM-Nummer 07) eine Leuchtdiode angeschlossen haben, dann können Sie die LED wie folgt ein- und ausschalten:
pinctrl set 7 op dh # LED an Pin 26 ein
pinctrl set 7 op dl # LED an Pin 26 aus
Dieser Artikel ist der Auftakt einer Mini-Serie, die sich mit der Script-Programmierung des Raspberry Pi 5 beschäftigt. Geplant sind drei Artikel:
Hinter den Kulissen hat sich mit der Vorstellung des Raspberry Pi 5 mehr geändert, als es in den ersten Testberichten den Anschein hatte. Schuld daran ist der neue I/O-Chip RP1, der unter anderem für die Kommunikation mit der GPIO-Leiste und der Kamera zuständig ist. Der RP1 bringt natürlich viele Vorteile mit sich (u.a. die Möglichkeit, zwei Kameras anzuschließen und größere Bild- bzw. Videomengen zu verarbeiten); er führt aber auch dazu, dass über Jahre etablierte Module und Kommandos nicht mehr funktionieren. Ja, die Raspberry Pi Foundation hat vorgearbeitet und empfiehlt schon eine Weile alternative Werkzeuge. Aber aus Bequemlichkeit blieben viele Programmierer bei langjährig bewährten Tools. Damit ist jetzt Schluss. Wer den Pi 5 als Maker-Tool nutzen will, muss umlernen.
In der Vergangenheit gab es mehrere GPIO-Kommuniktionsmechanismen, z.B. das Lesen/Schreiben von sysfs-Dateien (sys/class/gpio) bzw. das direkte Verändern von Speicherbereichen. Diese Verfahren haben schon in der Vergangenheit oft Probleme bereitet. Beim Raspberry Pi 5 funktionieren sie schlicht nicht mehr. Neue Verfahren verwenden die lgpio-Bibliothek, die wiederum auf eine neue Kernel-Schnittstelle zurückgreift. Diese ist nach außen hin durch die Device-Dateien /dev/gpiochip* sichtbar.
Aus Python-Sicht ist insbesondere das Modul rpi.gpio betroffen. Es ist inkompatibel zum Pi 5 und es gibt anscheinend auch keine Pläne, den Code RP1-kompatibel zu reorganisieren.
Schon seit einiger Zeit empfiehlt die Raspberry Pi Foundation, das gpiozero-Modul zu verwenden. Es stellt für den Einstieg gut geeignete Klassen wie LED oder Button zur Verfügung, eignet sich aber auch für anspruchsvollere Maker-Aufgaben.
Wenn Sie sich partout nicht mit gpiozero anfreunden wollen, gibt es drei Alternativen: lgpio, gpiod und rpi-lgpio.
Das Python-Modul gpiozero macht die Steuerung von Hardware-Komponenten durch GPIOs besonders einfach. Für häufig benötigte Hardware-Komponenten gibt es eigene Klassen. Dazu zählen unter anderem:
LED (Leuchtdiode ein-/ausschalten)PWMLED (Helligkeit einer Leuchtdiode mit Software Pulse Width Modulation steuern)RGBLED (dreifarbige LED, die über drei GPIO-Ausgänge gesteuert wird) TrafficLights (Kombination aus einer roten, gelben und grünen Leuchtdiode)MotionSensor (für PIR-Bewegungssensoren)LightSensor (Lichtdetektor)Button (Taster) Buzzer (Summer)Motor (zur Steuerung von zwei GPIOs für Vorwärts- und Rückwärts-Signale)Robot (zur Steuerung mehrerer Motoren)MCP3008 (für den gleichnamigen A/D-Converter) Das Modul gpiozero ist umfassend dokumentiert:
https://gpiozero.readthedocs.io/en/latest
Ein Hello-World-Beispiel sieht so aus:
#!/usr/bin/env python3
from gpiozero import LED
import time
myled = LED(7) # BCM-Nummer 7 = Pin 26 des J8-Headers
print("LED ein")
myled.on()
time.sleep(1)
print("LED aus und Programmende")
myled.off()
Dieses Script setzt voraus, dass Pin 26 der GPIO-Leiste (intern BCM/GPIO 7) über einen Vorwiderstand mit einer Leuchtdiode verbunden ist. Anstelle der GPIO-Nummer gibt es einige alternative Adressierungsverfahren, wobei Sie den gewünschente GPIO-Kontakt als Zeichenkette angeben:
# alternative, gleichwertige Schreibweisen
myled = LED(7) # GPIO 7 = BCM-Nummer 7
myled = LED("GPIO7") # GPIO 7 (Achtung, nicht "GPIO07")
myled = LED("BCM7") # BCM 7 (nicht "BCM07")
myled = LED("BOARD26") # Pin 26 auf der GPIO-Leiste des Boards
myled = LED("J8:26") # Pin 26 des J8-Headers (= GPIO-Leiste)
lgpio (der Projektname lautet noch kürzer lg) ist eine C-Bibliothek zur lokalen Steuerung der GPIOs. Das gerade erwähnte Modul gpiozero verwendet intern seit Version 2.0 die lgpio-Bibliothek. Alternativ stellt das gleichnamige lgpio-Modul eine direkte Python-Schnittstelle zur lgpio-Bibliothek her. Deren Funktionen sind Hardware-näher implementiert. Der GPIO-Zugriff verbirgt sich also nicht hinter Klassen wie LED oder Button, vielmehr werden die GPIO-Schnittstellen direkt angesprochen.
Ein Hello-World-Beispiel mit lgpio sieht so aus:
#!/usr/bin/env python3
import lgpio, time
# Zugriff auf /dev/gpiochip4 für RP1-Chip
handle = lgpio.gpiochip_open(4)
# Raspberry Pi 4 und früher:
# handle = lgpio.gpiochip_open(0)
# GPIO 7 = Pin 26 als Output verwenden
led = 7
lgpio.gpio_claim_output(handle, led)
# LED zehnmal ein- und ausschalten
for i in range(10):
print("LED ein")
lgpio.gpio_write(handle, led, 1)
time.sleep(1)
print("LED aus")
lgpio.gpio_write(handle, led, 0)
time.sleep(1)
# nichts blockieren
lgpio.gpiochip_close(handle)
Beachten Sie, dass die Initialisierung des Handles für den GPIO-Zugriff je nach Modell variiert! Bei den älteren Raspberry-Pi-Modellen bis einschließlich 4B/400 müssen Sie handle = lgpio.gpiochip_open(0) ausführen. Beim Raspberry Pi 5 ist für die GPIO-Steuerung dagegen der neue RP1-Chip zuständig, den Sie mit gpiochip_open(4) ansprechen. (Die richtige Chip-Nummer stellen Sie am einfachsten mit dem Kommando gpioinfo aus dem Paket gpiod fest. Der hier benötigte Kontakt GPIO7 heißt in gpioinfo ein wenig verwirrend PIN7.)
Wenn Sie mit Python ein lgpio-Script schreiben wollen, das auf allen Pi-Modellen funktioniert, müssen Sie Code zur Erkennung des Pi-Modells integrieren.
Weiterer Codebeispiele finden Sie hier:
Was tun, wenn Sie Code für ältere Modelle entwickelt haben, den Sie nun für den Raspberry Pi 5 portieren möchten? Am schnellsten wird dies oft mit dem neuen Modul rpi-lgpio gelingen, das weitgehende Kompatibilität zu rpi.gpio verspricht.
Vor der Installation müssen Sie das in Raspberry Pi OS standardmäßig installierte Modul rpi.gpio installieren. Eine Parallelinstallation beider Module ist ausgeschlossen, weil rpi.gpio und rpi-lgpio den gleichen Modulnamen verwenden (import RPi.GPIO).
sudo apt remove python3-rpi.gpio
Da es in Raspberry Pi OS für rpi-lgpio kein fertiges Paket, installieren Sie dieses am einfachsten mit pip. Da es kein passendes Systempaket gibt, sind keine Konflikte zu erwarten. Wenn Sie die Option --break-system-packages dennoch vermeiden möchten, müssen Sie eine virtuelle Python-Umgebung einrichten.
pip install --break-system-packages rpi-lgpio
Das obige pip-Kommando installiert das Modul lokal, also nur für Ihren Account. Wenn Sie Ihr Script in einem anderen Account ausführen möchten (z.B. als Cron-Job), stellen Sie dem Kommando sudo voran und installieren so rpi-lgpio systemweit.
Nach diesen Vorbereitungsarbeiten sollten viele Ihre alten Scripts ohne Änderungen laufen. Einige Sonderfälle sind hier dokumentiert:
https://rpi-lgpio.readthedocs.io/en/release-0.4/differences.html
Die folgenden Zeilen zeigen einmal mehr eine Schleife zum Ein- und Ausschalten einer Leuchtdiode:
#!/usr/bin/env python3
# Das Script setzt voraus, dass vorher
# rpi-lgpio installiert wurde!
import RPi.GPIO as gpio
import time
# BCM-GPIO-Nummern verwenden
gpio.setmode(gpio.BCM)
# LED an Pin 26 = GPIO 7
gpio.setup(7, gpio.OUT)
# LED über Pin 26 fünf Mal ein- und ausschalten
for _ in range(5):
print("LED ein")
gpio.output(7, gpio.HIGH)
time.sleep(1)
print("LED aus")
gpio.output(7, gpio.LOW)
time.sleep(1)
# alle vom Script benutzten GPIOs/Pins wieder freigeben
gpio.cleanup()
Das Python-Modul gpiod wird durch das Paket python3-libgpiod zur Verfügung gestellt, das unter Raspberry Pi OS standardmäßig installiert ist. Das Modul stellt eine Python-Schnittstelle zur Bibliothek libgpiod her. Diese Bibliothek ist wiederum eine Alternative zu der schon erwähnten lgpio-Bibliothek. Da es zum Python-Modul kaum Dokumentation gibt, ist gpiod nur für Entwickler von Interesse, die mit libgpiod bereits C-Programme entwickelt haben. Als Ausgangspunkt für eine eigene Recherche eignen sich die beiden folgenden Seiten:
Das folgende Minibeispiel zeigt, wie Sie eine LED an Pin 26 (GPIO 7) fünf mal ein- und ausschalten:
#!/usr/bin/env python3
import gpiod, time
chip = gpiod.Chip('gpiochip4') # RP1 (Raspberry Pi 5)
led = chip.get_line(7) # GPIO 7 = Pin 26 des J8-Headers
led.request(consumer="example", type=gpiod.LINE_REQ_DIR_OUT)
for _ in range(5): # 5x ein- und ausschalten
led.set_value(1)
time.sleep(1)
led.set_value(0)
time.sleep(1)
Dieser Beitrag baut auf dem Artikel „PHP7.4-fpm auf PHP8.1-fpm für Nextcloud“ auf.
Im Januar 2023 hatte ich erklärt, wie ich mein Raspberry Pi OS 11 (basierend auf Debian 11 Bullseye), durch Einbinden einer Fremdquelle, von PHP7.4-fpm auf PHP8.1-fpm aktualisiert habe. Warum ich zu diesem Zeitpunkt die Version 8.1 installiert habe, ist recht einfach zu beantworten. Die aktuelle Version Nextcloud 25 war noch nicht kompatibel zu PHP 8.2. Erst mit Nextcloud 26 war ein Upgrade möglich.
Nun habe ich mich nach der Aktualisierung auf Nextcloud 28 entschieden auf PHP 8.2 zu wechseln. Da ich den FastCGI-Prozessmanager FPM bevorzuge, unterscheidet sich das Upgrade etwas von einer herkömmlichen PHP-Installation.

Zuerst wird das System auf den aktuellen Stand gebracht.
sudo apt update && sudo apt upgrade -y
Ein Check zeigt, welche PHP-Version momentan aktiv ist.
php -v
Hier die Ausgabe:
PHP 8.1.27 (cli) (built: Dec 21 2023 20:17:59) (NTS) Copyright (c) The PHP Group Zend Engine v4.1.27, Copyright (c) Zend Technologies with Zend OPcache v8.1.27, Copyright (c), by Zend Technologies
Jetzt werden alle benötigten Pakete nachinstalliert (auch das von Nextcloud 28 verlangte bz2 und der von mir eingesetzte Redis-Server).
sudo apt install php8.2 php8.2-mbstring php8.2-gd php8.2-curl php8.2-imagick php8.2-intl php8.2-bcmath php8.2-gmp php8.2-mysql php8.2-zip php8.2-xml php8.2-apcu libapache2-mod-php8.2 php8.2-bz2 php8.2-redis
Nun wird via CLI die PHP-Version von 8.1 auf 8.2 mit
sudo update-alternatives --config php
umgestellt.
sudo update-alternatives --config php Es gibt 5 Auswahlmöglichkeiten für die Alternative php (welche /usr/bin/php bereitstellen). Auswahl Pfad Priorität Status ------------------------------------------------------------ 0 /usr/bin/php.default 100 automatischer Modus 1 /usr/bin/php.default 100 manueller Modus 2 /usr/bin/php7.4 74 manueller Modus * 3 /usr/bin/php8.1 81 manueller Modus 4 /usr/bin/php8.2 82 manueller Modus 5 /usr/bin/php8.3 83 manueller Modus
sudo update-alternatives --config php Es gibt 5 Auswahlmöglichkeiten für die Alternative php (welche /usr/bin/php bereitstellen). Auswahl Pfad Priorität Status ------------------------------------------------------------ 0 /usr/bin/php.default 100 automatischer Modus 1 /usr/bin/php.default 100 manueller Modus 2 /usr/bin/php7.4 74 manueller Modus 3 /usr/bin/php8.1 81 manueller Modus * 4 /usr/bin/php8.2 82 manueller Modus 5 /usr/bin/php8.3 83 manueller Modus
Ein abschließender Check zeigt die aktuelle Version.
php -v
PHP 8.2.14 (cli) (built: Dec 21 2023 20:18:00) (NTS) Copyright (c) The PHP Group Zend Engine v4.2.14, Copyright (c) Zend Technologies with Zend OPcache v8.2.14, Copyright (c), by Zend Technologies
Ist die Ausgabe korrekt, kann PHP8.1-fpm deaktiviert, PHP8.2-fpm installiert und aktiviert werden.
sudo a2disconf php8.1-fpm sudo apt install php8.2-fpm sudo a2enconf php8.2-fpm
Der Restart des Webservers führt nun die Änderungen aus.
sudo service apache2 restart
Da in der Nextcloud nun wieder die bekannten Fehlermeldungen auftauchen, heißt es, diese schrittweise abzuarbeiten. Dazu wird die neue php.ini geöffnet
sudo nano /etc/php/8.2/fpm/php.ini
und die Werte für memory_limit sowie session_lifetime wie empfohlen angepasst.
memory_limit = 512M session.gc_maxlifetime = 3600
Der Block
opcache.enable=1 opcache.interned_strings_buffer=64 opcache.max_accelerated_files=10000 opcache.memory_consumption=256 opcache.save_comments=1 opcache.revalidate_freq=1
für den Zwischenspeicher OPchache wird ans Ende der php.ini gesetzt.
Zur Optimierung von PHP8.2-fpm werden speziell für das Modell Raspberry Pi 4 mit 4GB RAM in der Datei www.conf mit
sudo nano /etc/php/8.2/fpm/pool.d/www.conf
folgende Werte von
pm = dynamic pm.max_children = 5 pm.start_servers = 2 pm.min_spare_servers = 1 pm.max_spare_servers = 3
auf
pm = dynamic pm.max_children = 120 pm.start_servers = 12 pm.min_spare_servers = 6 pm.max_spare_servers = 18
angepasst und der Dienst neu gestartet.
sudo service php8.2-fpm restart
Danach muss in der apcu.ini das Command Line Interface des PHP Cache noch aktiviert werden, indem
sudo nano /etc/php/8.2/mods-available/apcu.ini
folgende Zeile am Ende eingetragen wird.
apc.enable_cli=1
Ist dies geschehen, wird der Webserver ein letztes Mal neu gestartet.
sudo service apache2 restart
Die Umstellung bringt zwar im Moment keine erkennbaren Vorteile, jedoch verschafft es wieder ein wenig Zeit und senkt den Druck das eigentliche Raspberry Pi OS 11 Bullseye durch die aktuelle Version 12 Bookworm zu ersetzen.
Es gibt genügend Situationen, in denen Du Deinem Raspberry Pi eine statisch IP-Adresse zuweisen möchtest. Vielleicht dient ein Pi als Server – sei es für eine Nextcloud im Wohnzimmer, ein NAS oder ein VPN-Router. Um Deinem Raspberry Pi eine fixe IP-Adresse zuzuweisen, hast Du mehrere Optionen. Hast Du Zugriff auf den Router im Netzwerk, genauer gesagt den DHCP-Server, kannst Du ihn nutzen, um dem PI via MAC-Adresse immer die gleiche IP-Adresse zu geben. Du kannst die statische IP-Adresse aber auch […]
Der Beitrag Statische IP-Adresse bei Raspberry Pi OS Bookworm ist von bitblokes.de.

Du kannst ab sofort das kostenlose PDF von MagPi 136 herunterladen. Die Print-Ausgabe des Magazins ist vor circa 3 Wochen erschienen und jetzt ist auch das PDF kostenlos erhältlich. In dieser Ausgabe liegt der Schwerpunkt auf einem vollständigen Einkaufs-Leitfaden zum Thema Raspberry Pi. Zudem gibt es einen Artikel, wie Du ungebetene Gäste im Garten abschrecken kannst. Der Artikel bezieht sich speziell auf Füchse und Dachse. Auch die Gezeiten-Uhr ist eine tolle Idee. Der Ersteller wollte sie haben, da er bei […]
Der Beitrag MagPi 136 – kostenloses PDF jetzt verfügbar ist von bitblokes.de.

Heute möchte ich zeigen, wie ich meine Nextcloud mit dem Virenscanner ClamAV ausgerüstet habe. Da eine Cloud ja ein guter Verteiler von Daten ist, kann es schnell vorkommen, dass man mit einer Synchronisation viele Endgeräte unbeabsichtigt mit einem Virus infiziert. Um dies zu verhindern, bietet Nextcloud die App Antivirus for files aus dem hauseigenen App store an. Zur Nutzung der App sind jedoch ein paar Vorbereitungen auf dem Server nötig.
Da ich im privaten Alltag ausschließlich mit Linux arbeite, mache ich mir i.d.R. kaum wirkliche Sorgen um Viren, Trojaner und Co. Trotzdem möchte ich meine Cloud im höchsten Maße absichern und das System weiter härten.
Diese Anleitung bezieht sich auf eine Nextcloud-Instanz, welche auf einem Raspberry Pi mit Rasberry Pi OS gehostet ist und zeigt einen guten Ansatz, um die Verteilung von Viren zu verhindern.
Zuerst installiert man die Pakete clamav, clamav-freshclam und clamav-daemon mit folgendem Befehl.
sudo apt install clamav clamav-freshclam clamav-daemon -y
Im Anschluss muss der Dienst clamav-freshclam nochmals gestoppt werden, um die Virus-Datenbank aufzufrischen. Danach wird der Service erneut gestartet.
sudo service clamav-freshclam stop sudo freshclam sudo service clamav-freshclam start
Die Abfrage der Datenbank wird per Standard nun 12 Mal pro Tag automatisch ausgeführt.
Ein Check via
sudo service clamav-freshclam status
zeigt, ob der Dienst ordnungsgemäß läuft. Die Ausgabe sollte wie im Screenshot aussehen.

Ein weiterer Test gibt Aufschluss, ob der clamav-daemon ebenfalls korrekt arbeitet.
sudo service clamav-daemon status

Da dies bei mir nicht auf Anhieb funktionierte, musste ich diesen Service nochmals neu starten.
Dies erledigt man mit dem Befehl:
sudo service clamav-daemon restart
Natürlich sollte jetzt noch einmal der Status, wie zuvor erwähnt, abgefragt werden. Wenn beide Dienste fehlerfrei durchlaufen, kann man sich nun der Konfiguration der zuvor erwähnten App in der Nextcloud widmen.
Nachdem beide Dienste korrekt arbeiten, installiert man die App Antivirus for files (Antivirus für Dateien). Unter Verwaltung -> Sicherheit wählt man folgende Einstellungen. Im Feld „Wenn infizierte Dateien während eines Hintergrund-Scans gefunden werden“ kann zwischen „Nur loggen“ oder „Datei löschen“ gewählt werden, wie mit einer infizierten Datei umgegangen werden soll.

Das Abspeichern der Einstellungen sollte mit einem grünen „Gespeichert“ protokolliert werden. Wer das Ganze testen möchte, kann sich hierzu (Vorsicht: auf eigene Gefahr) einen Testvirus von eicar.org herunterladen und diesen in die Nextcloud hochladen.
Auf Windows-Systemen ist äußerste Vorsicht geboten, da man hier schnell vom eigenen Virenscanner in Quarantäne gesetzt wird. Diesen Test sollten nur Experten durchführen!
Der Raspberry Pi war bisher durch die Verwendung von SD-Karten stark limitiert. Das Start-up Pineberry Pi beendet diese Abhängigkeit für den RasPi 5.

Heute möchte ich über ein sinnvolles und relativ schnell nachzurüstendes Feature zur Nextcloud berichten. Der zeitliche Aufwand beträgt nur wenige Minuten, ist aber zum Schutz der eigenen Daten eine gut investierte Zeit.
Ab und zu kam es vor, dass ich mich aus meiner Cloud nicht richtig abgemeldet, sondern nur den Browser geschlossen hatte. Beim nächsten Aufruf meiner Nextcloud stellte ich fest, dass ich plötzlich im Datenbereich bin, ohne mich vorher eingeloggt zu haben.
Mein Gedanke: Was würde passieren, wenn ein Unberechtigter so Zugriff auf alle in einer Cloud abgelegten Daten bekommt? Nicht auszudenken, der Schaden wäre wohl immens.
Damit dies nicht vorkommt, ist es sinnvoll ein Auto Logout einzurichten. Hierzu öffnet man als Erstes die config.php der Nextcloud
sudo nano /var/www/html/nextcloud/config/config.php
und trägt die folgenden Werte am Ende ein.
'remember_login_cookie_lifetime' => 1296000, 'session_lifetime' => 3600, 'session_keepalive' => false, 'auto_logout' => true,
Eine Session wird auf 30 Minuten sowie die Lebensdauer des Login-Cookies auf 15 Tage begrenzt. Diese Werte können natürlich den eigenen Wünschen und Gegebenheiten angepasst werden.
Dabei gilt zu beachten, dass die session.gc_maxlifetime in der php.ini >= der eingestellten session_lifetime sein muss. Dazu öffne ich die php.ini von PHP 8.1 FPM
sudo nano /etc/php/8.1/fpm/php.ini
und setze den Wert auf 3600.
session.gc_maxlifetime = 3600
Nun muss PHP bzw. der Webserver neu gestartet werden, um die Änderungen wirksam umzusetzen.
sudo service php8.1-fpm restart
Ein geschlossener Browser führt nun, wie gewünscht, zu einem Auto Logout.
Die aktuelle Raspberry-Pi-Version verwendet auf den Raspberry-Pi-Modellen 4B, 400 sowie 5 Wayland als Default-Grafiksystem. Aus diesem Grund funktionieren viele Programme zur Fernwartung bzw. für Remote-Desktop-Funktionen nicht mehr wie gewohnt. Betroffen ist unter anderem RealVNC, bisher die Default-Lösung der Raspberry Pi Foundation. RealVNC verspricht etwas vage, im Verlauf des Jahres 2024 eine Wayland-kompatible Version ihrer Software zu veröffentlichen. An dieser Stelle erkläre ich Ihnen, was Sie tun können, wenn Sie nicht solange warten möchten.
Das X Window System und der Xorg-Server bilden das traditionelle Grafiksystem von Linux. Es basiert auf einem Client/Server-Modell und hat sich jahrzehntelang bewährt. Allerdings ist der Xorg-Server mit vielen Altlasten und Sicherheitsproblemen verbunden. Die Software wird schon seit mehrere Jahren nicht mehr weiterentwickelt und kaum noch aktiv gewartet. Seine Zeit läuft ab.
Der Nachfolger von Xorg heißt Wayland ist dagegen »nur« ein neues Protokoll für die Kommunikation zwischen dem Wayland Compositor (einem Display-Server) und den Anwendungsprogrammen (Clients). Wayland bricht mit dem X Window System und verspricht ein System, das schlanker, sicherer und effizienter ist. Wayland gehört die Zukunft.
Zwar sind mittlerweile viele Programme Wayland-kompatibel, aber leider nicht alle. Besonders große Probleme gibt es bei Programmen, die den Bildschirminhalt auslesen wollen, also Tools für Screenshots, Screencasts, Screen Sharing und Remote Desktop. Derartige Funktionen sind auch unter Wayland möglich, müssen aber vollständig neu implementiert werden.
Ob Ihr Raspberry Pi Wayland oder Xorg als Grafiksystem verwendet, stellen Sie am einfachsten mit einem Kommando im Terminal fest:
echo $XDG_SESSION_TYPE
wayland
Im Desktop-Betrieb lauten die möglichen Antworten wayland oder x11. In einer SSH-Session im Textmodus lautet das Ergebnis dagegen tty.
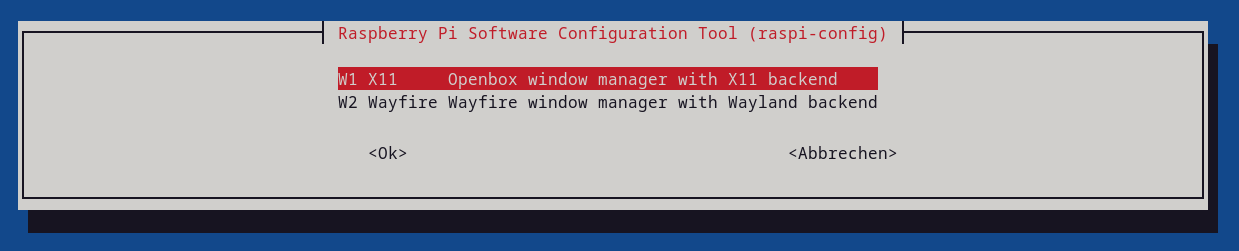
Die bei weitem einfachste Lösung besteht darin, das Grafiksystem von Wayland zurück auf Xorg umzustellen. Dazu führen Sie in einem Terminal-Fenster sudo raspi-config aus und wählen zuerst den Menüpunkt Advanced Options, dann Wayland. Jetzt können Sie sich zwischen dem X11 Backend und dem Wayland Backend entscheiden. Gleichzeitig ändert sich auch der Window Manager (Openbox versus Wayfire). Optisch ergeben sich daraus aber nur geringe Unterschiede.
Die Einstellung wird in der Datei /etc/lightdm/lightdm.conf gespeichert:
# in der Datei /etc/lightdm/lightdm.conf
...
# für Wayland:
user-session=LXDE-pi-wayfire
# oder für X:
user-session=LXDE-pi-x
Die Umstellung des Grafiksystems wird erst nach einem Neustart wirksam. Die meisten Remote-Desktop-Tools inklusive RealVNC sollte nun wieder wie gewohnt funktionieren. Der RealVNC-Server ist standardmäßig installiert. Die Aktivierung kann aber nicht über das Raspberry-Pi-Konfigurationsprogramm erfolgen. Dessen VNC-Option gilt nur für wayvnc und muss deaktiviert (!) sein, sonst kommt es zu einem Port-Konflikt. Den RealVNC-Dienst aktivieren Sie anschließend wie folgt:
sudo systemctl enable --now vncserver-x11-serviced
Ein VNC-Icon im Panel zeigt an, dass der Start funktioniert hat, und gibt Aufschluss darüber, ob gerade eine Verbindung aktiv ist.
Allerdings gibt es auch hier eine Einschränkung: Der RealVNC-Server funktioniert nur in der 64-Bit-Version von Raspberry Pi OS Bookworm, nicht aber mit der 32-Bit-Version. Dieses Problem soll aber in naher Zukunft behoben werden.
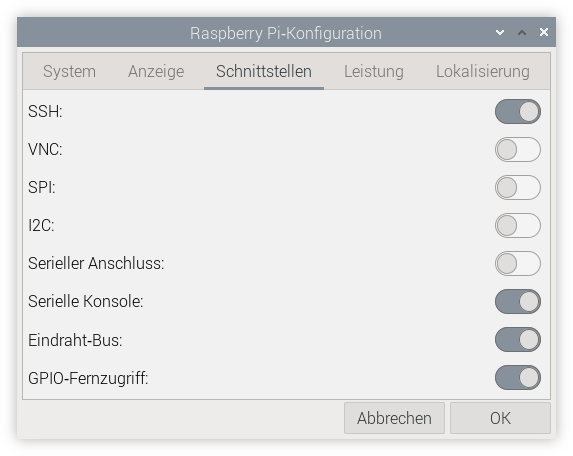
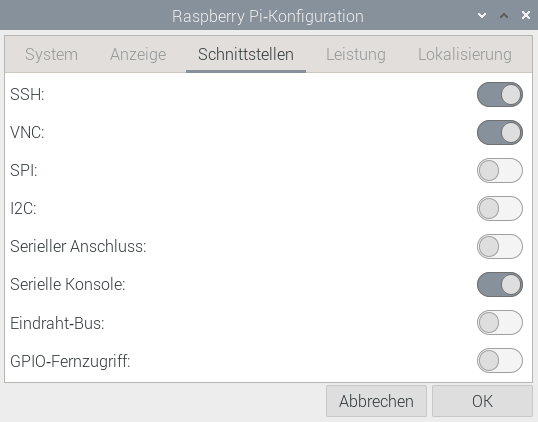
Wenn Sie bei Wayland bleiben, steht das neue Programm wayvnc zur Verfügung. Sie aktivieren es am einfachsten mit dem Programm Raspberry Pi-Konfiguration im Dialogblatt Schnittstellen, Option VNC.
Daraus resultiert die folgende Konfigurationsdatei /etc/xdg/autostart/wayvnc.desktop:
[Desktop Entry]
Type=Application
Name=wayvnc
Comment=Start wayvnc
NoDisplay=true
Exec=/usr/bin/wayvnc --render-cursor --keyboard=de
OnlyShowIn=wayfire
Jetzt brauchen Sie auf Ihrem Client-Rechner (auf dem Rechner, mit dem Sie Ihren Raspberry Pi steuern möchten), einen zu wayvnc kompatiblen VNC-Client. Der Raspberry-Pi-Blog empfiehlt das Programm vncviewer des Projekts TigerVNC. Die meisten Linux-Distributionen stellen ein entsprechendes Paket zur Verfügung. Für Windows und macOS (Intel) finden Sie hier Downloads.
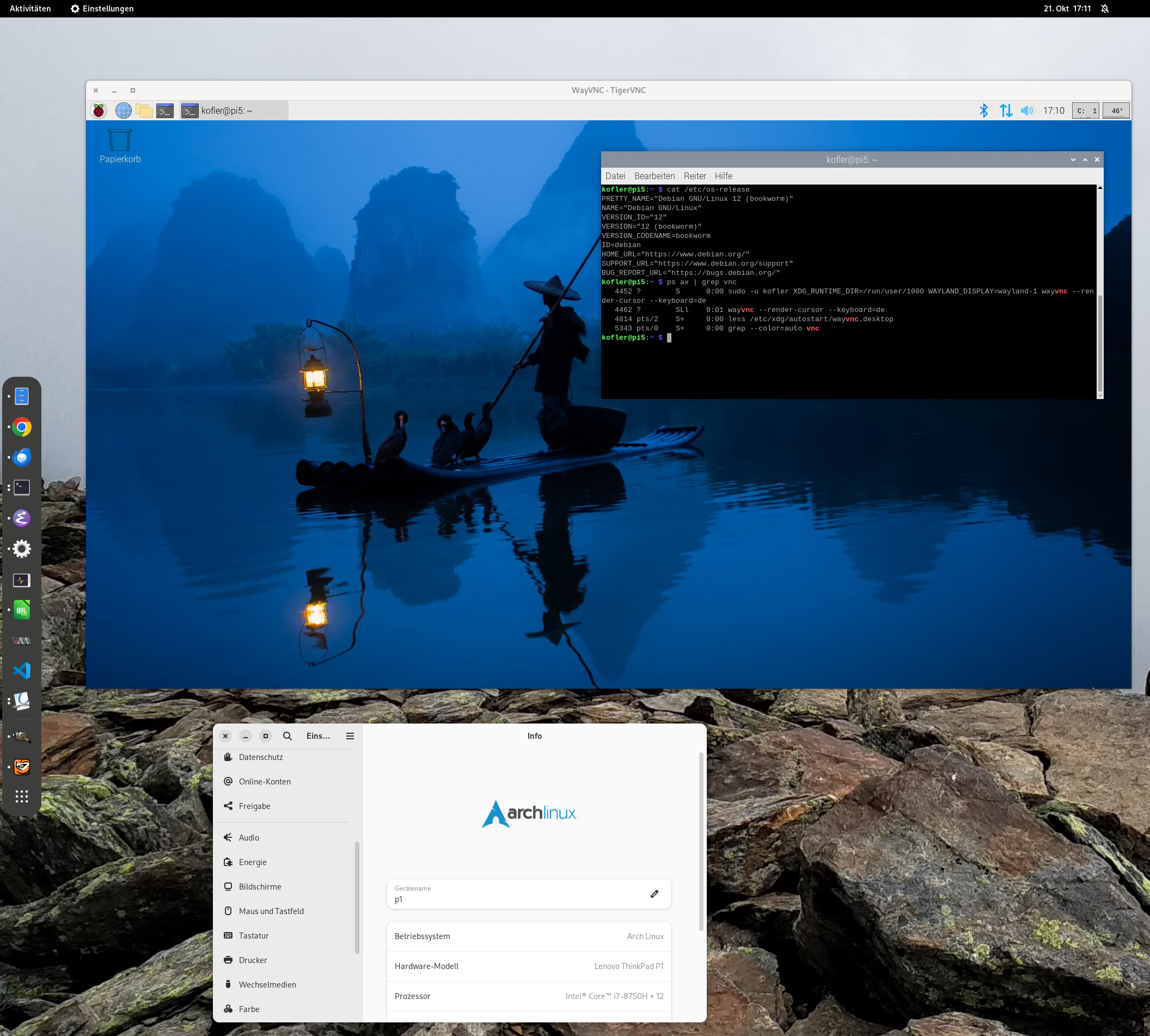
Bei meinen Tests unter Windows ist der Verbindungsaufbau mit dem Programm Remotedesktopverbindung gescheitert. Mit dem vncviewer von TigerVNC hat es dann aber funktioniert.
Sofern der Raspberry Pi mit einem eigenen Monitor verbunden ist, gilt für den Remote Desktop dieselbe Bildschirmauflösung. Wenn der Raspberry Pi dagegen »headless« läuft, können Sie die gewünschte Auflösung mit sudo raspi-config, Display Options, VNC Resolution einstellen (maximal 1920×1080, erfordert einen Reboot).
Raspberry Pi Imager 1.8.1 unterstützt den demnächst verfügbaren Raspberry Pi 5. Zudem wurde die Auswahl von Gerät und Abbild vereinfacht. Telemetriedaten sind leider als Opt-out umgesetzt.

pip ist das Paketverwaltungs-Tool von Python. Wenn Sie in einem Script ein Zusatzmodul benötigen, führen Sie einfach pip install xxx bzw. unter macOS und bei manchen Linux-Distributionen pip3 install xxx aus. pip lädt das erforderliche Modul sowie eventuelle Abhängigkeiten herunter und installiert die Pakete lokal (d.h., sie brauchen meine root-Rechte).
Meistens funktioniert pip gut — aber nicht immer. Die häufigste Fehlerquelle unter Windows ist die Parallelinstallation mehrerer Python-Versionen. Dann ist nicht immer klar, auf welche Python-Version sich pip bezieht. Nach meiner Erfahrung scheint pip zumeist die falsche Version zu nehmen. Daher mein Tipp: Vermeiden Sie unter Windows unbedingt die Mehrfachinstallation von Python!
Aber auch unter Linux kann es Probleme geben. Die Ursache hier besteht darin, dass viele Distributionen selbst eine riesige Sammlung von Paketen mit Python-Erweiterungen anbieten. Die Parallelinstallation eines Moduls, einmal mit apt oder dnf und ein zweites Mal mit pip, kann dann zu Konflikten führen — insbesondere dann, wenn nicht exakt dieselben Versionen zum Einsatz kommen. Die Python-Entwickler haben deswegen im Python Enhancement Proposals (PEP) 668 festgeschrieben, dass in solchen Fällen Pakete aus Linux-Repositories vorzuziehen sind. PEP 668 gilt grundsätzlich seit Python 3.11. Tatsächlich implementiert ist es momentan nur in aktuellen Linux-Distributionen:
Noch nicht implementiert ist PEP 668 dagegen unter RHEL und Fedora (auch nicht in Version 39 Beta).
Der Versuch, mit pip ein Modul zu installieren, führt bei aktuellen Debian-, Ubuntu- und Raspberry-Pi-OS-Versionen zur folgenden Fehlermeldung:
$ pip install matplotlib
error: externally-managed-environment
This environment is externally managed
To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python
installation or OS distribution provider. You can override this,
at the risk of breaking your Python installation or OS, by
passing --break-system-packages. Hint: See PEP 668 for the
detailed specification.
Die obige Fehlermeldung weist direkt auf die beste Lösung hin — nämlich die Installation des entsprechenden Linux-Pakets mit apt python3-xxx, wobei xxx der Paketname ist. Für die matplotlib führen Sie unter Debian, Ubuntu und Raspberry Pi OS das folgende Kommando aus:
sudo apt install python3-matplotlib
Diese Empfehlung ist mit zwei Einschränkungen verbunden: Sie erfordert, dass Sie root– oder sudo-Rechte haben, und sie setzt voraus, dass das gewünschte Modul tatsächlich im Repository Ihrer Linux-Distribution zur Verfügung steht. Letzteres ist oft der Fall, aber nicht immer. Auf pypi.org gibt es fast 500.000 Projekte, die Debian-Standard-Repositories enthalten dagegen »nur« gut 4000 (apt list | grep python3- | wc -l).
Ein Virtual Environment im Kontext von Python ist ganz einfach ein Projektverzeichnis, in das die für das Projekt erforderlichen Module lokal und projektspezifisch installiert werden. Das hat mehrere Vorteile:
Virtuelle Umgebungen werden von Python durch das Modul venv unterstützt. Dieses Modul muss vorweg installiert werden, entweder mit apt install python3-venv oder durch apt install python3-full. Anschließen richten Sie Ihr Projekt ein:
$ python3 -m venv my-project
Python erzeugt das Verzeichnis my-project, falls dieses noch nicht existiert, und richtet dort eine minimale Python-Umgebung ein. (»Minimal« bedeutet: ca. 1500 Dateien, Platzbedarf ca. 25 MByte. Nun ja.) Nun führen Sie in Ihrem Terminal-Fenster mit source das Shell-Script activate aus, um die Umgebung zu aktivieren:
$ cd my-project
$ source bin/activate
(my-project)$
In dieser Umgebung funktioniert pip wie gewohnt. In der Folge können Sie Ihr Script ausführen, das die lokal installierte Module nutzt:
(my-project)$ pip install requests beautifulsoup4
(my-project)$ ./my-webscraping-script.py
Anstelle venv direkt zu nutzen, gibt es diverse Tools, um die Verwaltung Ihrer virtuellen Umgebungen zu vereinfachen. Am bekanntesten sind pipenv und virtualenv. Persönlich ist mir pipenv am liebsten. Das Tool muss vorweg installiert werden (apt install pipenv).
pipx ist eine Variante zum klassischen pip-Kommando, das sich gleichzeitig um die Einrichtung einer virtuellen Umgebung kümmert (siehe auch die Dokumentation). pipx ist allerdings nicht zur Installation von Bibliotheken gedacht, sondern zur Installation fertiger Python-Programme. Diese werden in .local/bin gespeichert.
pipx ist nur dann eine attraktive Option, wenn Sie ein als Python-Modul verfügbares Programm unkompliziert installieren und ausführen wollen. Wenn Sie dagegen selbst Scripts entwickeln, die von anderen Modulen abhängig sind, ist pipx nicht das richtige Werkzeug.
pip --break-system-packagesEin vierter Lösungsweg besteht darin, an pip die Option --break-system-packages zu übergeben. Die Option ist weniger schlimm, als ihr Name vermuten lässt. Im Prinzip funktioniert pip jetzt so wie bisher und installiert das gewünschte Modul, ganz egal, ob es ein äquivalentes Paket Ihrer Distribution gibt oder nicht, und unabhängig davon, ob dieses Paket womöglich schon installiert ist.
Empfehlenswert ist der Einsatz dieser Option in CI-Scripts (Continuous Integration), z.B. in Test- oder Deploy-Scripts für git (siehe auch diesen Blog-Beitrag von Louis-Philippe Véronneau). Die Option --break-system-packages ist oft der schnellste und bequemste Weg, nicht mehr funktionierende Scripts wieder zum Laufen zu bringen.
(Aktualisiert am 15.10.2023, Geekbench-Ergebnisse mit/ohne Lüfter)
Nach Raspberry Pi OS Bookworm habe ich mir heute auch Ubuntu 23.10 auf dem Raspberry Pi angesehen. In aller Kürze: Der Raspberry Pi 5 ist ein großartiger Desktop-Rechner, Ubuntu mit Gnome unter Wayland läuft absolut flüssig.
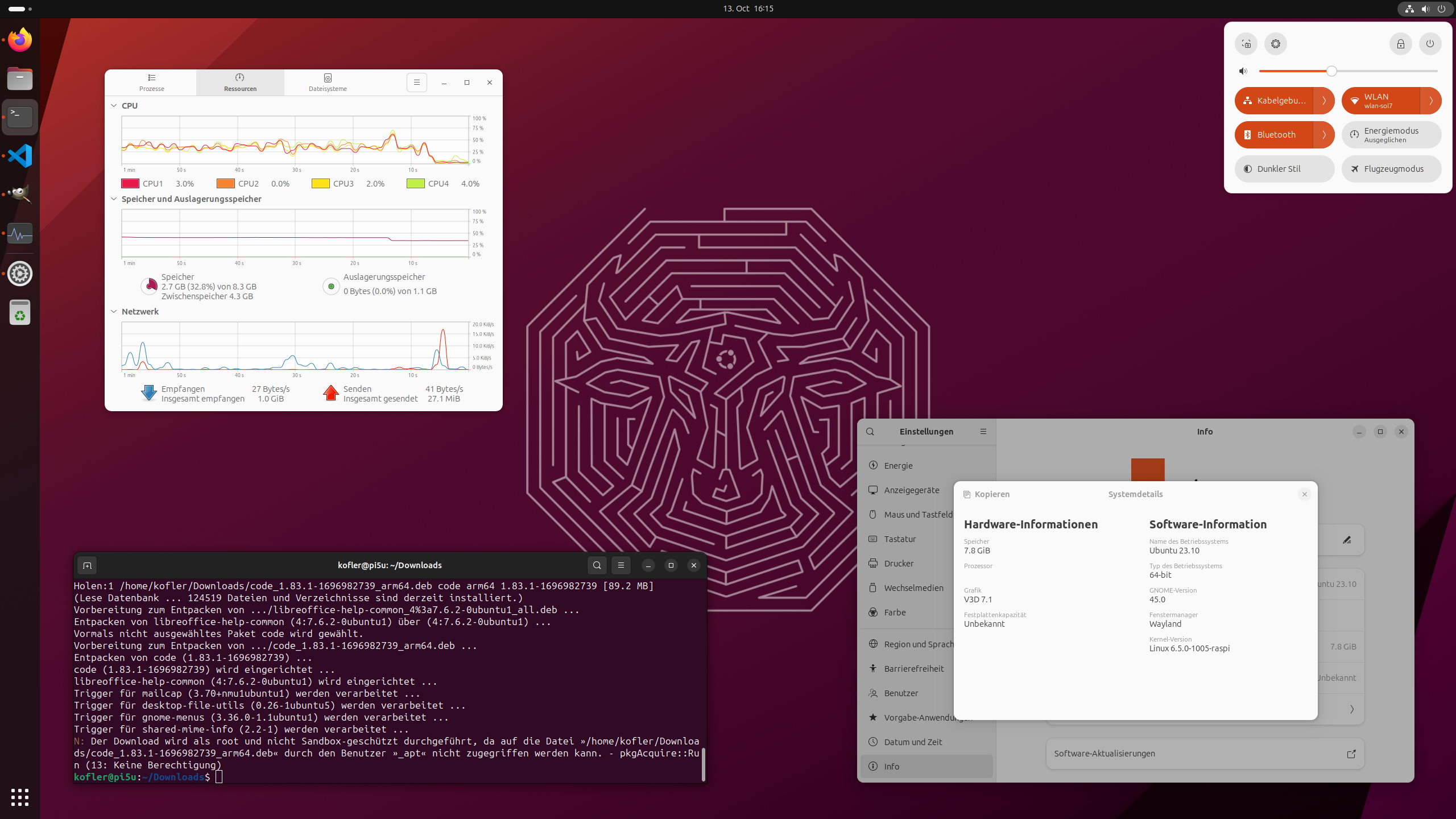
Die Desktop-Version von Ubuntu 23.10 läuft nur auf den Modellen 4B, 400 und 5 und beansprucht zumindest 4 GiB RAM. Bei meinem Test mit offenem Terminal, Firefox (zwei Tabs mit GitHub und orf.at) sowie dem neuen App Center waren erst gut 2 GiB RAM in Verwendung. Mit offenem Gimp, VS Code und App Center steigt der Speicherbedarf dann auf 4 GiB. Insofern sind für’s ernsthafte Arbeiten 8 GiB RAM sicher kein Schaden.
Zur Installation habe ich mit dem Raspberry Pi Imager Ubuntu 23.10 auf eine SD-Karte übertragen. Die Spracheinstellung in der Konfigurationsphase beim ersten Starts bleibt wirkungslos und muss später in den Systemeinstellungen nachgeholt werden. Außerdem müssen mit Installierte Sprachen verwalten alle erforderlichen Sprachdateien heruntergeladen werden.
Ein initiales Ubuntu-Desktop-System beansprucht etwa 6 GByte auf der SD-Karte. Mit Schuld am verhältnismäßig großem Speicherbedarf für ein Ubuntu-»Minimalsystem« ohne Anwendungsprogramme ist der unmäßige Speicherbedarf der vorinstallierten Snap-Paketen (App Center, Firefox plus alle dazu erforderlichen Basisbibliotheken).
Gnome 45 mit Wayland läuft absolut flüssig. Nur der Start von Snap-Apps führt zu kleinen Verzögerungen — das kennt man ja auch von Ubuntu-Installationen auf hochwertiger Hardware. Bei meinem Testrechner (Pi 5 mit 8 GiB RAM) braucht Firefox beim ersten Start ca. 4 Sekunden, bis es am Bildschirm erscheint. Damit kann man wirklich leben ;-)
Screenshots funktionieren auf Anhieb.
Bei der Erkennung der Systemdaten (also Info/Systemdetails in den Einstellungen) versagt Gnome aber und kann weder die CPU noch die Größe der SD-Karte erkennen (siehe die Abbildung oben). Aber das sind Kleinigkeiten.
Ubuntu verwendet mit Version 6.5 einen neueren Kernel als Raspberry Pi OS. Im Gegensatz zu Raspberry Pi OS kommt die »normale« Pagesize von 4 kByte zum Einsatz:
pi5u$ uname -a
Linux pi5u 6.5.0-1005-raspi #7-Ubuntu SMP PREEMPT_DYNAMIC
Sun Oct 8 08:06:18 UTC 2023 aarch64 aarch64 aarch64 GNU/Linux
pi5u$ getconf PAGESIZE
4096
Erstaunlicherweise fehlt in der Snap-Bibliothek Visual Studio Code. Ein Debian-Paket für ARM64 kann von https://code.visualstudio.com heruntergeladen werden. Es muss dann mit sudo apt install ./code_xxx.deb installiert werden. Die nachfolgende Fehlermeldung pkgAcquire::Run / Keine Berechtigung können Sie ignorieren. Vergessen Sie aber nicht, ./ bzw. einen gültigen Pfad voranzustellen, sonst glaubt apt, code_xxx.deb wäre der Paketname und verweigert die Installation der lokalen Datei.
Unter https://www.geekbench.com/preview/ gibt es eine AArch64-Version von Geekbench, die ich heruntergeladen, ausgepackt und ausgeführt habe. Die Temperatur des SoC steigt während der Tests auf über 85 °C. Die CPU-Frequenz wird in der Folge auf 1,5 GHz gedrosselt. Ich habe keine Kühlung verwendet (weder aktiv noch passiv). Ergebnisse unter diesen Voraussetzungen: 657
Single-Core Score, 1233 Multi-Core Score. Mehr Details finden Sie hier: https://browser.geekbench.com/v6/cpu/3060411
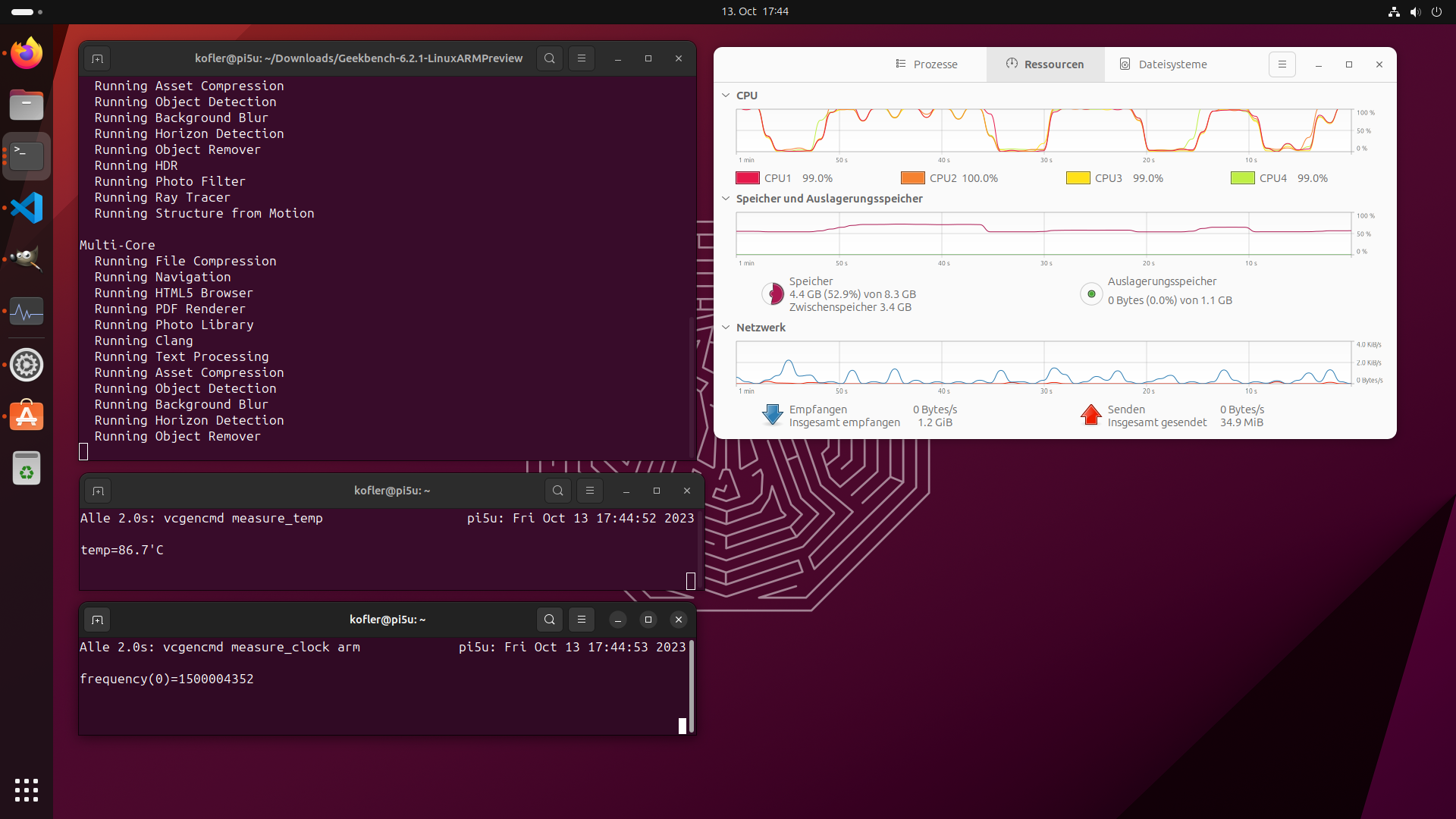
Im Leerlauf unter Ubuntu 23.10 beträgt die CPU-Temperatur übrigens gut 70°C, also auch schon mehr als genug.
Ubuntu fehlt eine dynamische Lüftersteuerung. Sobald ein Lüfter angeschlossen wird, läuft dieser mit maximaler Leistung und produziert ein durchaus störendes Ausmaß an Lärm. Die CPU-Temperatur sinkt dann im Leerlauf auf gut 30°C. Selbst während der Ausführung von Geekbench steigt die Temperatur nur kurzzeitig über 45°C. Gleichzeitig fallen die Werte etwas besser aus (siehe auch https://browser.geekbench.com/v6/cpu/3095791).
Geekbench 6 Single-Core Multi-Core
-------------- ------------ ------------
Ohne Lüfter 657 1233
Mit Lüfter 737 1542
Eine letzte Anmerkung zu Geekbench: Die 64-Bit-Version von Raspberry Pi OS und Geekbench 6.2 sind wegen der 4-kByte-Pagesize inkompatibel zueinander.
Während meiner Tests kam es zweimal zu kapitalen Abstürzen (Bildschirm wurde schwarz, kein Netzwerkzugriff mehr etc.). Möglicherweise war das von mir eingesetzte Netzteil zu schwach. (Unter Raspberry Pi OS hatte ich mit demselben Netzteil allerdings keine Probleme.)
Ich bin dann auf das neue Original-Raspberry-Pi-Netzteil umgestiegen (27 W für einen Minirechner erscheinen wirklich mehr als üppig, aber sei’s drum). Die Komplett-Abstürze haben sich nicht wiederholt.
Allerdings ist in der Folge auch Gimp bei der Verwendung des Dateiauswahldialogs zweimal abgestürzt. Das kenne ich von meinem Notebook überhaupt nicht. Ich kann natürlich nicht sagen, ob dieses Problem ARM-, Ubuntu- oder Raspberry-Pi-spezifisch ist. Aber für zwei Stunden Betrieb waren das für meinen Geschmack recht viele Abstürze …
Seit gestern ist die neue Version von Raspberry Pi OS auf der Basis von Debian 12 (»Bookworm«) verfügbar. Diese Version ist Voraussetzung für den Raspberry Pi 5, läuft aber natürlich auch auf älteren Raspberry Pis. Ich habe meine Tests auf einem Pi 5 sowie einem Pi 400 durchgeführt.
Auf den ersten Blick sieht der Desktop auf der Basis von LXDE nahezu unverändert aus. Aber dieser Eindruck täuscht erheblich: Raspberry Pi OS verwendet jetzt Wayland, PipeWire und den NetworkManager.
Auf aktuellen Raspberry-Pi-Modellen (Pi 4, Pi 400, Pi 5) kommt nun standardmäßig Wayland statt xorg als Fundament für das Grafiksystem zum Einsatz.
pi5$ echo $XDG_SESSION_TYPE
wayland
Das ist ein großer Schritt, weil dafür viele Komponenten verändert bzw. hinzugefügt werden mussten:
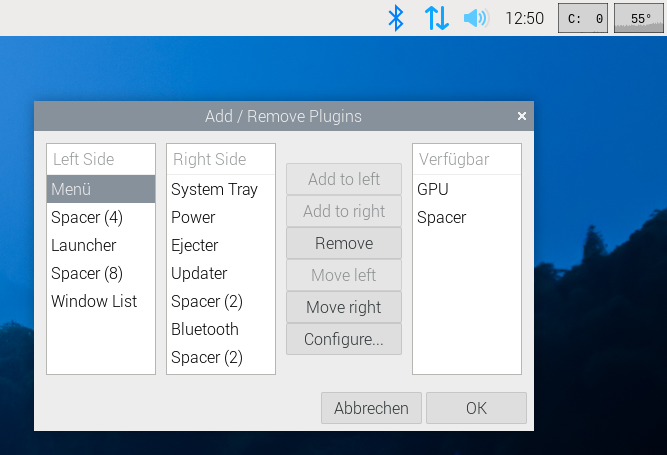
Zusammen mit dem Panel mussten auch die diversen Plugins für das Menü, die Bluetooth- und WLAN-Konfiguration, Lautstärkeeinstellung usw. neu implementiert werden.
Der Wayland-Umstieg ist mit den von anderen Desktop-Systemen bekannten Einschränkungen bzw. Kinderkrankheiten verbunden: Fernwartung, Screenshots usw. zicken bzw. funktionieren gar nicht. Auf das Thema VNC und Remote Desktop gehe ich hier in einem eigenen Artikel ein. Zum Erstellen von Screenshots verwenden Sie am besten das Kommando grim (siehe Projektseite). Gimp und scrot liefern lediglich schwarze Bilder, shutter stürzt ab.
Ältere Raspberry-Pi-Modelle (Pi 3, Zero etc.) verwenden aufgrund von Performance-Problemen weiterhin xorg. Aber auch bei diesen Modellen ist in Zukunft der Wechsel zu Wayland geplant.
Nach Fedora, Ubuntu & Co. verwendet nun auch Raspberry Pi OS das neue PipeWire-Audiosystem. Es ersetzt PulseAudio. Für die Desktop-Nutzung der Audio-Funktionen sollten sich dadurch nichts ändern. Wenn Sie Audio-Funktionen per Script steuern möchten, müssen Sie sich an die neuen pw-xxx-Kommandos gewöhnen (siehe https://docs.pipewire.org/page_tools.html).
Ähnlich wie beim Audio-System passt sich Raspberry Pi OS auch bei der Netzwerkkonfiguration den anderen Distributionen an und verwendet nun den NetworkManager als Backend. dhcpcd hat ausgedient. Wiederum ist von der Änderung an der Oberfläche nicht viel zu sehen. Die Konfigurationswerkzeuge zur Herstellung einer WLAN-Verbindung sehen ähnlich aus wie bisher. Allerdings gibt es nun diverse neue Funktionen, z.B. zur Herstellung von VPN-Verbindungen. Änderung ergeben sich auch, wenn Sie die Netzwerkkonfiguration per Script verändern möchten. Das wichtigste neue Kommando ist nmcli. Die Konfigurationsdateien werden in /etc/NetworkManager gespeichert. WLAN-Passwörter landen in /etc/NetworkManager/system-connections/*.conf.
Bei meinen Tests traten im Zusammenspiel mit dem Raspberry Pi Imager bei der Vorweg-Konfiguration (z.B. für Headless-Systeme) noch Fehler auf. Es ist aber zu erwarten/hoffen, dass diese bald gelöst sein werden.
In der Vergangenheit galt Chromium als Default-Webbrowser für Raspberry Pi OS. In Kooperation mit Mozilla wurde nun auch Firefox besser an die Hardware- und Software-Eigenheiten angepasst und wird nun als gleichwertige Alternative angeboten. Standardmäßig sind beide Programme installiert. Den Default-Webbrowser können Sie im Programm Raspberry-Pi-Konfiguration festlegen.
Aus nostalgischen Gründen bin ich ein großer Fan von Mathematica und finde es fantastisch, dass das Programm Raspberry-Pi-OS-Anwendern kostenlos zur Verfügung steht. Das gilt auch für die neue Version von Raspberry Pi OS — aber aktuell nicht auf dem Pi 5. Dort erscheint beim Start der Hinweis, dass ein Lizenzcode erforderlich ist. Anscheinend soll dieses Problem Update 9.11.2023: Mit den neuesten Updates funktioniert nun auch Mathematica wieder — und zwar schneller denn je!
noch behoben werden. Die Raspberry Pi Foundation wartet diesbezüglich auf ein Update von Wolfram (Quelle).
Dank des neuen Fundaments auf der Basis von Debian 12 haben sich viele Versionsnummern geändert:
Basis Desktop Programmierung Server
--------------- ------------------ -------------- --------------
Kernel 6.1 Gimp 2.10 bash 5.2 Apache 2.4
glibc 2.36 LibreOffice 7.4 gcc 12.2 CUPS 2.4
Mesa 23.2 LXDE 11 Java 17 MariaDB 10.11
Systemd 247 VLC 3.0 PHP 8.2 OpenSSH 9.2
X-Server 21.1 Python 3.11 Samba 4.17
Wayland 1.21
Bisher war es unter Python gebräuchlich, Zusatzmodule einfach mit pip bzw. pip3 zu installieren. In aktuellen Python-Versionen ist das nicht mehr erwünscht und führt zu einem Fehler:
$ pip install --user matplotlib
error: externally-managed-environment
This environment is externally managed
To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
For more information visit http://rptl.io/venv
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.
Es gibt zwei Auswege:
sudo apt install python3-matplotlib lauten.
Der andere Lösungsweg setzt voraus, dass Sie für ihr Python-Projekt eine virtuelle Umgebung verwenden (siehe auch https://www.raspberrypi.com/documentation/computers/os.html#python-on-raspberry-pi).
Der geänderte Umgang mit Python-Modulen hat übrigens nichts mit Raspberry Pi OS zu tun, sondern ist eine von der Python-Entwicklergemeinde vorgegebene Änderung, die alle modernen Linux-Distributionen betrifft.
Auf https://www.raspberrypi.com/software/operating-systems sowie im Programm Raspberry Pi Imager wird nach wie vor die 32-Bit-Version von Raspberry Pi OS empfohlen. Die 64-Bit-Version ist dort nur die zweite Option.
Ich habe meine Tests dagegen mit der 64-Bit-Version durchgeführt, die für Pi-Modelle mit mehr als 2 GByte zweckmäßiger ist, einzelnen Prozessen mehr RAM zuordnen kann und etwas mehr Geschwindigkeit verspricht.
Interessanterweise kommt je nach Raspberry-Pi-Modell eine unterschiedliche Pagesize zum Einsatz: 16 kByte auf dem Raspberry Pi 5 aber wie bisher 4 kByte auf dem Raspberry Pi 400.
pi5$ getconf PAGESIZE
16384
pi400$ getconf PAGESIZE
4096
Die 16-kByte-Pagesize ist übrigens zu manchen Programmen inkompatibel. Unter anderem kann deswegen Geekbench 6.2 nicht in der 64-Bit-Version von Raspberry Pi OS ausgeführt werden.
Der Raspberry Pi 5 enthält eine Buchse zum Anschluss eines CPU-Lüfters. Raspberry Pi OS kümmert sich darum, den Lüfter nur nach Bedarf einzuschalten, und auch dann dynamisch (also nur in der erforderlichen Drehzahl). Im Leerlaufbetrieb bleibt der Raspberry Pi 5 lautlos.
Ein Upgrade eines bereits installierten Raspberry Pi OS »Bullseye« auf Version »Bookworm« ist theoretisch durch eine Veränderung der Paketquellen möglich (siehe z.B. hier im Raspberry-Pi-Forum). Diese Vorgehensweise wird aber explizit nicht unterstützt und führt nach meinen eigenen Erfahrungen oft zu massiven Problemen. Wenn Sie die aktuelle Version von Raspberry Pi OS nutzen möchten, müssen Sie also eine SD-Karte neu damit einrichten. Das hat natürlich den Nachteil, dass Sie alle Konfigurationsarbeiten wiederholen und ggfs. Ihre eigenen Projekte bzw. Ihren Code manuell übertragen und womöglich auch adaptieren müssen.
Smart Homes sind in aller Munde. Bei Neubauten sowieso, aber auch bestehende Immobilien werden gerne zu so genannten Smart Homes umgerüstet. Den großen Markt teilen sich natürlich kommerzielle Anbieter, aber gerade auf der Softwareseite konkurrieren auch freie und open source Software um die Kunden. Die bekanntesten Teilnehmer im open source Bereich sind FHEM, OpenHAB und Home Assistant (früher bekannt als hass.io).
Diese Software soll verschiedene smarte Geräte vereinen, so dass sie alle unter einer Haube stecken. Anstatt jeweils eine Anwendung für die Heizung, das Licht und die Energieversorgung zu verwenden, soll die Software übergeordnet sein. Sie bildet damit die Schnittstelle zwischen den Geräten und mir.
Ich möchte mein Haus mit dem Home Assistant smart machen, bzw. einige der vorhandenen Komponenten dort einbinden. In diesem Artikel möchte ich zunächst auf die Installation von Home Assistant Container eingehen.
Der mächtige Home Assistant wird gerne auf einem Raspberry Pi installiert. In der Regel verwendet man dafür gleich ein ganzes Image für das Betriebssystem. Das bedeutet, dass man statt des üblichen Raspbian das „Home Assistant Operating System“ installiert.
Der Vorteil liegt darin, dass man den Home Assistant in vollem Umfang nutzen kann. Der Nachteil ist, dass man über ein stark angepasstes OS verfügt. Möchte man noch weitere Software darauf laufen lassen, könnte das zu Konflikten führen.
In meinem Fall laufen noch andere Prozesse auf dem Raspberry. Somit kommt für mich das OS nicht infrage. Stattdessen möchte ich auf Home Assistant Container setzen. Hier läuft die Software über Docker.
Benutzt man den Home Assistant Container, muss man mit Einschränkungen leben. Es ist beispielsweise nicht möglich, Add-ons zu installieren. Der Grund liegt meines Wissens darin, dass Add-ons als (Docker-)Container installiert werden. Und das geht nicht, wenn bereits die Hauptanwendung in einem (Docker-) Container läuft. [Falls das jemand genauer weiß, gerne einen Kommentar hinterlassen!]

Was man als Vorbereitung braucht, ist ein installiertes Linux-System. In meinem Beispiel ist es Raspbian auf einem Raspberry Pi 4. Dort meldet man sich via SSH an.
Schritt 1: Docker installieren. Gegebenenfalls hat man eine alte Version bereits installiert. Diese muss man entfernen und die aktuelle Version installieren. Dazu wird das Docker-Repository hinzugefügt und die Software daraus installiert. Am Ende wird eine Benutzergruppe „docker“ erstellt (ggf. geschieht das automatisch). Der aktuelle Benutzer – hier nennt er sich pi – wird der Gruppe hinzugefügt.
sudo apt-get remove docker docker-engine docker.io containerd runc
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg lsb-release
curl -fsSL https://download.docker.com/linux/debian/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/debian \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
sudo groupadd docker
sudo usermod -aG docker piSchritt 2: Home Assistant Container installieren. Der folgende Befehl holt sich das entsprechende Image aus dem Dockerhub, lädt es herunter und installiert es. Es ist wichtig, dass der Ordnerpfad für die Konfigurationsdatei korrekt angegeben wird. Wie oben bereits beschrieben, fehlt die Add-on-Funktion. Um die configuration.yaml bearbeiten zu können, muss man an diese Datei herankommen. Mit der Flag -v mountet man einen existierenden Ordner in den Docker-Container und kann damit die Datei weiterhin bearbeiten.
mkdir /home/pi/homeassistant/config
docker run -d \
--name="homeassistant" \
--privileged \
--restart=unless-stopped \
-e "TZ=Europe/Berlin"
-v /home/pi/homeassistant:/config \
--net=host \
homeassistant/home-assistant:stableWer lieber Docker Compose verwendet, kann den folgenden Eintrag in die *.yaml eintragen:
name: smart_home_p10
services:
home-assistant:
container_name: homeassistant
privileged: true
restart: unless-stopped
environment:
- TZ=Europe/Berlin
volumes:
- /home/pi/homeassistant:/config
network_mode: host
image: ghcr.io/home-assistant/home-assistant:stableSchritt 3: Docker-Image verwalten. Die gesamte Home Assistant Installation kann man über den Container starten und stoppen. Ein Update führt man ebenfalls über das Docker-Image aus. Die Befehle hierfür lauten folgendermaßen.
# Update installieren
docker pull homeassistant/home-assistant:stable# Container stoppen und entfernen
docker stop homeassistant
docker rm homeassistantSchritt 4: Auf Home Assistant zugreifen. Ab jetzt erfolgt die Verwaltung des Home Assistant über die Weboberfläche. Mit http://<IP-Adresse des Raspberrys>:8123 kann man von einem PC des gleichen Netzwerks auf die Installation zugreifen. Änderungen an der configuration.yaml müssen weiterhin über die Systemoberfläche, also z.B. mit nano oder vim über SSH erfolgen.
nano /home/pi/homeassistant/config/configuration.yamlThe post Home Assistant Container installieren first appeared on bejonet - Linux | Smart Home | Technik.
Der Raspberry Pi 4 kann 4K@60Hz ausgeben. Unter LibreELEC muss dies über die config.txt aktiviert werden. Leider funktioniert die Methode (noch) nicht mit LibreELEC 10. Über den Texteditor: Steckt die SD-Karte in euren PC,...
Im vorherigen Beitrag habe ich euch gezeigt wie ihr den Hauppauge WinTV-soloHD oder Hauppauge WinTV-dualHD unter Linux einrichtet. Hinweis: Für Raspberry Pi OS 10 „Buster“ gibt es derzeit (Stand: Januar 2021) keine eigenen Tvheadend...
Ein NAS zu verwenden ist in vielen Situationen sinnvoll. Wenn man beispielsweise mehrere netzwerkfähige Geräte verwendet, seien es PCs, Tablets oder Fernseher, können alle Geräte auf den gleichen Speicher zugreifen. Dort gespeicherte Dateien, beispielsweise Urlaubsfotos, können dann auf allen diesen Geräten angezeigt werden.
Meine Motivation ist allerdings vor allem der redundante Festplattenspeicher. Ich verwende ein NAS mit zwei Festplatten. Ich werde sie so konfigurieren, dass beide Festplatten sich gegenseitig spiegeln, also exakt die gleichen Daten speichern. Das nennt sich RAID 1 (Redundant Array of independent disks). Fällt eine der beiden Festplatten aus, kann sie ersetzt werden und die Daten sind noch auf der zweiten Festplatte gespeichert.
Das aktuelle Einstiegsmodell von Synology, DS218j, genügt für mich allemal. Ich werde einen relativ geringen Traffic darauf laufen lassen und brauche dort keine übermäßige Rechenleistung (momentan habe ich keinen Bedarf an Videocodierung oder anderen aufwendigen Berechnungen). Ich kann von meinen Geräten im Heimnetzwerk darauf zugreifen und haben die besagte Ausfallsicherheit durch das RAID 1.
Andere Hersteller kommen natürlich auch in Frage. Für meine Bedürfnisse ist es schon beinahe egal, wer das NAS herstellt. Ich habe mich für den Hersteller entschieden, der in meinem Bekanntenkreis bereits verwendet wird.
Prinzipiell gibt es sogar die Möglichkeit, das NAS über ein Raspberry Pi selbst zu bauen. Das Betriebssystem OpenMediaVault kann man das sogar recht komfortabel umsetzen. Ein halbwegs neuer Raspberry Pi und externe Festplatten genügen, schon kann man die Low Budget Variante selber bauen. Die Einrichtung funktioniert anschließend über den Browser, so wie es auch in den kommerziellen Varianten der Fall ist.

Ich entschied mich für die kommerzielle Variante. Das ist – zugegeben – eher untypisch für mich und das Blog. Normalerweise bin ich eher der Bastler, der gerne solche Systeme selber baut. In diesem speziellen Fall war mir die Kaufvariante allerdings lieber.
Die zweite Frage, nachdem die Entscheidung auf die Diskstation DS218j gefallen ist, lautet: welche Festplatten werde ich verwenden?Die sogenannten NAS-Festplatten sind robuster ausgestattet als die typischen Desktop-Festplatten. Die wesentlichen Unterschiede zwischen den Typen sind die folgenden:
Ich habe mal letztendlich für die NAS-Version von Western Digital entschieden (WD Red). Aus meiner Sicht sind alle HDD-Hersteller gleichbedeutend, es hätte genauso gut Seagate oder Sandisk oder etwas anderes werden können. Die NAS-Festplatten kosten nur unwesentlich mehr als die Desktop-Version.
The post Ein NAS verwenden: Grundsatz first appeared on bejonet.

